Environmental Engineering Reference
In-Depth Information
500
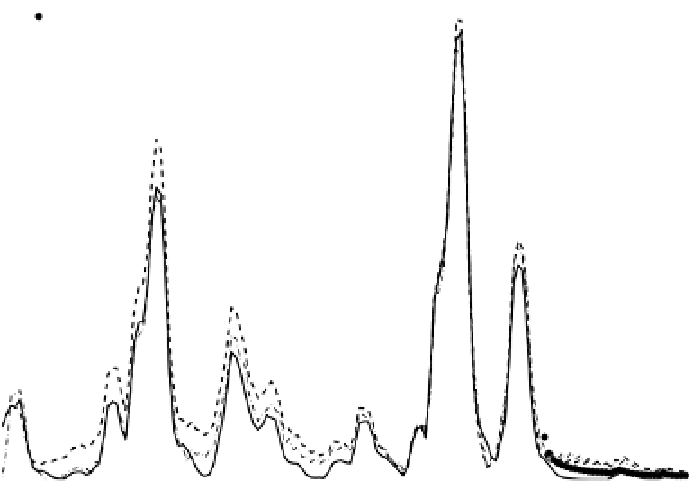
Measured flow
3rd order model
7th order model(1957.7)
7th order model(1955.3)
450
400
350
300
250
200
150
100
50
0
1953.1
1953.15
1953.2
1953.25
1953.3
1953.35
1953.4
1953.45
1953.5
Date
Fig. 9.6
Comparison of the simulated responses of the third-order estimated model and two seventh-order models
estimated at different times.
boundary (indicating the estimation of a very long
residence time); indeed, this sometimes becomes
transiently unstable and has to be stabilized. Ob-
viously, then, such a volatile andmarginally stable
model is not an appropriate vehicle for reliable
flood forecasting.
As noted in factor 4 of the above list, it is
possible to overcome the kind of over-parameter-
ization induced identifiability problems shown in
Figures 9.4 to 9.6, but only at the cost of imposing
tight prior constraints on the parameter values,
either deterministically, or stochastically. The
latter stochastic, or 'Bayesian', approach is more
sophisticated and defensible, since it recognizes
overtly the inherent uncertainty in the parameter
values. Figure 9.7 illustrates this process in the
case of the seventh-order model considered above.
Here, the left panel shows the same results as the
right panel in Figure 9.4, but the right panel illus-
trateswhat happens if themodel is estimated again
on the same data but with the prior parameter
estimate vector
u
0
and associated covariance ma-
trix P
u;0
(see above) related to their finally estimat-
ed values on the left panel (i.e. as estimated after
1681 days): in particular the prior estimate
u
0
is set
exactly to
u
1681
, while the prior covariance matrix
is set to P
u;0
¼
0.0001
P
1681
, ensuring that there
are very tight constraints on the subsequent recur-
sive estimates (and so implying great confidence in
the prior estimate
u
0
). As we see, this allows the
estimates to fluctuate by a small amount in re-
sponse to the information imparted by the latest
effective rainfall-flow behaviour but they remain
in the general location of their prior values. And at
the end of the data, the explanation of the data has
not changed much with R
T
¼ 0:865
.
6
The problemis, of course, thatwhen confronted
by the above results, the modeller might think
that themodel is well defined: it describes the data
as well as the third-order model and the parameter
estimates are stable and well defined. But this is
6
The dependence of the recursive estimation results on the
priors
u
0
and P
;0
is well known and, normally, a diffuse prior
(
u
0
¼
0; P
;0
¼
diag
10
6
) is assumed in order to avoid misleading
estimation results.