Information Technology Reference
In-Depth Information
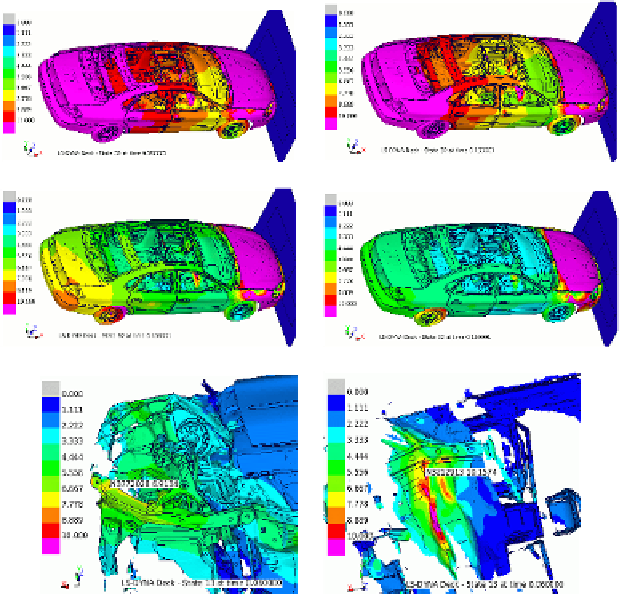
Fig. 2.
Temporal clustering of Ford Taurus crash test using DiffCrash. (
upper left):
original
scatter in mm. (
upper right - center left - center right):
consequent iterations of scatter
subtraction.
(bottom):
two major bifurcations found.
5.2
Ford Taurus Crash Test
The crash model shown on Fig.2 contains 1 million nodes, 32 timesteps, 25
simulations. Processing of this model with the temporal clustering algorithm
described above has been performed on a 16-CPU Intel-Xeon 2.9GHz workstation
with 24GB main memory. It required 3min per iteration and converged in 4 iterations.
Crash intrusions in the foot room of the driver and passenger are commonly
considered as critical safety characteristics of car design. These characteristics possess
numerical uncertainties, the analysis of which falls in the subject of Sec.3-4. The
upper left part of Fig.2 shows the scatter measure s(y), in mm, distributed on the
model. The scatter in the foot room is so large (>10mm) that direct minimization of
intrusion is impossible. Temporal clustering allows to identify sources of this scatter
and to subtract relevant contributions. Further images show how the scatter decreases
in these subtractions. After the 4
th
iteration the scatter in the foot room reaches a safe
level (<3mm). Several bifurcation points have been identified and subtracted per
iteration; in this way the performance of the algorithm has been optimized. The two
major bifurcations found are shown on the bottom part of Fig.2. They represent
Search WWH ::

Custom Search