Information Technology Reference
In-Depth Information
applications of CFD methods to the flow past AUVs and other underwater vehicles
are in the literature, see, e.g., [4-6]. The purpose of these investigations is to predict
properties such as added masses, pressure and friction distributions, drag, normal
force and moment coefficients, wake field, and stability derivatives. Comparison with
experimental measurements show that CFD is reliable and can yield accurate results.
Numerous studies on underwater vehicle design and optimization have been
reported which focus on the clean hull only, i.e., the appendages and the propulsion
system are neglected and the flow is taken to be past an axisymmetric body at a zero
angle of attack. Examples of such numerical studies can be found in [7-13]. Allen et
al. [2], on the other hand, report an experimental investigation of propulsion system
enhancements and drag reduction of an AUV.
The hydrodynamic design optimization of AUVs in full configuration, taking into
account the appendages and the propulsion system, is still an open problem. One of
the main challenges involved is the high computational cost of a CFD simulation. A
single CFD simulation of the three-dimensional flow past an AUV can take a few
hours up to several days, depending on the computational power, the grid density, and
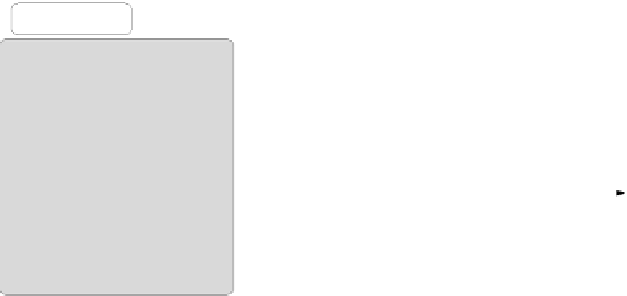
the flow conditions. Therefore, the direct optimization, as shown in Fig. 1(a), can be
impractial, especially using conventional gradient-based methods.
An important research area in the field of aerodynamic optimization is focused on
employing the surrogate-based optimization (SBO) techniques [14,15]. One of the
major objectives is to reduce the number of high-fidelity model evaluations, and
thereby making the optimization process more efficient. In SBO, the accurate, but
computationally expensive, high-fidelity CFD simulations are replaced—in the opti-
mization process—by a cheap surrogate model (Fig. 1(b)). SBO has been
successfully applied to the aerodynamic design optimization of various aerospace
components, such as airfoils [16], aircraft wings [17], and turbine blades [18].
(a) (b)
Fig. 1.
(a) Direct optimization, (b) surrogate-based optimization. Here,
x
(
i
)
denotes the design
variable vector at iteration
i
.















































































































































Search WWH ::

Custom Search