Information Technology Reference
In-Depth Information
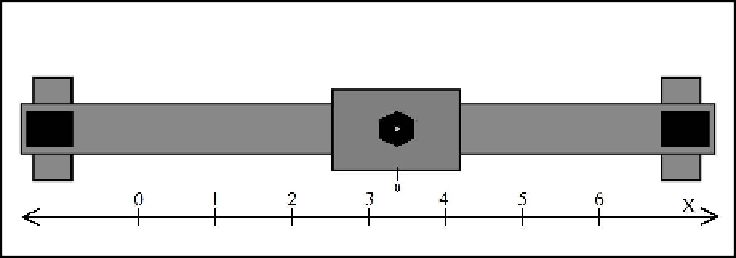
Fig. 5.
Simple example system to be controlled includes a cart that can be moved along a rail
hard to express with QVT concepts. In this case, for example handling of stereotypes
and tagged values related to them as well as interactive features of the transformation
were implemented as black boxes.
5
Example System and Utilization of the Tools
The purpose of this section is to provide a simple example in which the modelling
concepts and tools are used in creation of a simulation model of a controlled process to
evaluate two alternative interlocking approaches.
An illustration of the (partial) system to be controlled is shown in figure 5. The
system consists of a cart and a rail along which the cart can be moved with an electric
motor. The cart can be stopped with a brake, if necessary. The purpose of the cart is left
unspecified and not illustrated in the figure. It could be assumed, for example, to operate
a boom or a gripping device nearby the rail. The control needs to be addressed in the
example are related to controlling and interlocking the velocity and location of the cart.
The operator of the system controls the system by giving speed requests (setpoints)
with a joystick that is connected to the control system. The control system, on the other
hand, is required to control the velocity of the cart with feedback control and to protect
the cart from colliding to stoppers at the end of the rail. The location of the cart must
be kept between 0.0 and 6.0.
In industrial installations the need for a similar stopping interlocks could be caused
by, for example, forbidden areas in factories and sites or needs to restrict operation
ranges of booms and devices of mobile platforms to ensure their stability in varying
terrains. Consequently, despite the simplicity of the example, it can be considered as a
generalization of a common functionality in industrial systems.
There are several ways in which the functionality could be implemented; however,
in this paper we will sketch and simulate only two simple versions of them. Firstly,
the control system could observe the location and direction of the cart and stop it with
the brake, if the cart violates the limits. For example, when reaching coordinate 0.0,
the control system could activate the brake and keep it activated until the speed re-
quest would be towards back to the allowed area. Secondly, the control system could
Search WWH ::

Custom Search