Graphics Reference
In-Depth Information
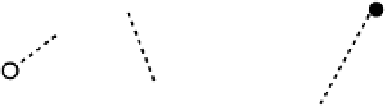
Q
P
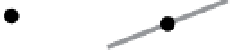
Figure 8.35.
The point-to-plane distance for ICP is the square of the length of the dotted line
for each pair of matching points. The gray line indicates a plane through each destination point
using its estimated normal.
where
. While this step has
been shown to provide much faster convergence in practice, it no longer per-
mits a simple closed-form solution to minimizing Equation (
8.15
), and the
convergence proof of Besl and McKay doesn't hold.
η
q
(
p
)
is the estimated unit normal vector at
q
(
p
)
•
Instead of treating every pair of points equally in Equation (
8.15
), weight the
pairs differently. For example, Smith et al. [
460
] recommended weighting fea-
ture points in proportion to their quality of match and using a robust cost
function related to those discussed in Section
5.3.3.3
to downweight points
with large alignment errors.
An additional refinement proposed by Smith et al. [
460
] is to incrementally expand
the regions of
allowed to participate in theminimization, starting froma very
narrow 3D window around an initial feature location and expanding the window
outward where there is sufficient evidence that the current estimate
T
is valid. This
is a variant of the dual-bootstrap ICP algorithm proposed by Yang et al. [
562
] for 2D
images.
Aligning a large number of 3D scans into the same coordinate system frequently
leverages pairwise scan registrations. Pulli [
378
] proposed an approach that begins by
aligning neighboring scans with point-to-plane ICP and forming a graph inwhich the
vertices correspond to scans and an edge connects two vertices if a high-quality (i.e.,
low error) rigid motion has been estimated between them. We record not only the
rigidmotion
T
ij
along the edge between scans
i
and
j
, but also uniformly subsampled
sets of the points in scans
i
and
j
in their area of overlap. We also compute the esti-
mated point positions
T
ij
P
and
Q
for each subsample point
p
in scan
i
and
T
−
1
ij
for each
subsample point
q
in scan
j
. Amulti-view registration cost function is then formed as
the sumof squared distances between each point and its predicted positions accord-
ing to the pairwise transformations from its neighbors in the graph. Pulli's algorithm
incrementally adds scans into the registered set in order of the number of neighbors
each scan has (i.e., its degree in the graph), solving a linear least-squares problem at
each step.
Rusinkiewicz and Levoy [
410
] combined several of these improvements to create
an ICP algorithm that ran in real time for the incremental registration of structured-
light scans of tabletop-sized models. While we typically want to register scans taken
with the same modality (e.g., LiDAR to LiDAR), algorithms like ICP can also be used
to register data fromdifferent modalities. For example, Zhao et al. [
578
] discussed the
(
p
)
(
q
)