Graphics Reference
In-Depth Information
The result of PMVS is a dense collection of small 3D patches with associated nor-
mals. This collection can optionally be turned into a triangulated mesh, for example
using the Poisson surface reconstructionmethod discussed in Section
21
. The result-
ing 3D reconstructions canobtain sub-millimeter accuracy on tabletop-sized objects,
andcentimeter accuracyon large-scale scans. Figure
8.27
illustrates anexample result
on one of Seitz et al.'s benchmarking datasets.
One drawback of patch-based methods is that they may contain holes, especially
in places where texture information in the images is unreliable. This may require a
3D-inpainting-like method to fill in holes and obtain a complete model. The algo-
rithms can also be quite slow (e.g., hours of running time). Nonetheless, patch-based
methods are quite appealing due to their generality; a patch-based multi-view stereo
approach was used by Goesele et al. [
171
] to generate high-quality models of land-
marks and large-scale building interiors/exteriors solely using community photo
collections (e.g., by keyword searching for “Trevi Fountain” on Flickr).
8.3.4
Depth Map Fusion
Since algorithms for creating disparitymaps fromstereo images (which correspond to
depthmaps when the cameras are calibrated) are now fairly mature (see Section
5.5
),
it makes sense to leverage such techniques when we have more than two source
images. The increased number of images has the additional benefit of decreasing
noise in the depth estimates and removing errors and outliers that might be difficult
to detect in each stereo pair independently.
Goesele et al. [
170
] presented a simple but highly effective multi-view stereo algo-
rithmbased on depthmap fusion. Each of the source images is considered in turn as a
reference image, and a set of spatially nearby cameras is chosen as its neighborhood.
For each pixel
p
in the reference view, a ray is backprojected into the scene, and a
candidate depth
d
(
)
p
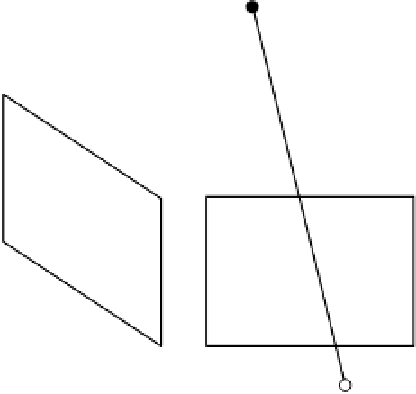
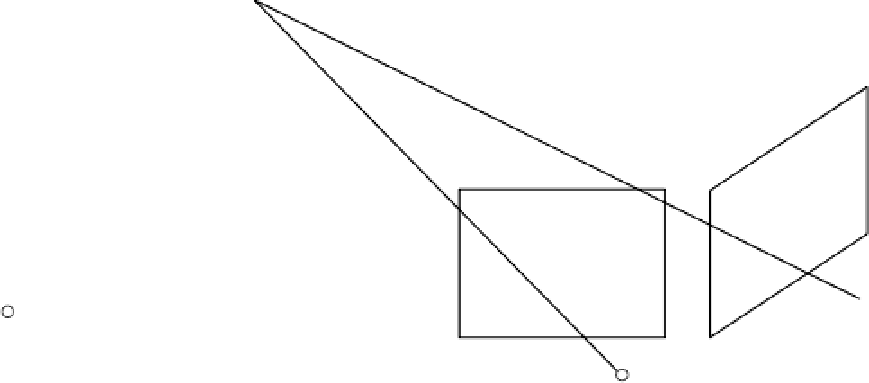
is considered, as illustrated in Figure
8.28
.
d(p)
p
Reference image
Figure 8.28.
A depth
d
)
is evaluated for a pixel
p
in the reference view by considering the
normalized cross-correlation of windows around the projected image locations.
(
p