Graphics Reference
In-Depth Information
intensity
at pixel x
object
t
0
123
t = 3
t = 2
t = 1.6
x
t = 1
Camera
image
plane
t = 0
Laser
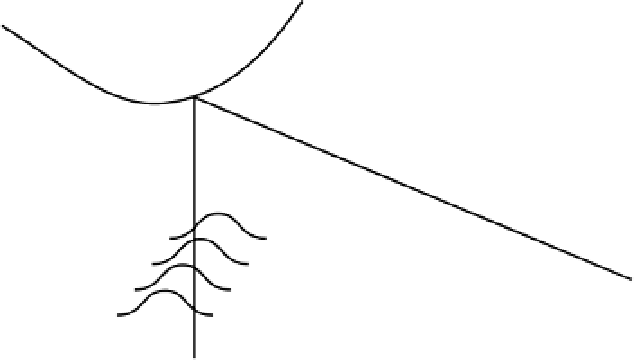
Figure 8.14.
Space-time analysis for better triangulation. The observed intensity at pixel
x
as
a laser stripe sweeps across the surface of an object is modeled as a Gaussian function (dotted
line, top right). The mean of the Gaussian gives an estimate of the time at which the laser stripe
is centered directly on the corresponding point on the 3D object.
pattern projected on
empty plane in scene
static
projected
image
camera
image
projective
transformation
projector
camera
Figure 8.15.
Calibrating an LCD or DLP projector by observing the projections of a checkerboard
on a blank plane.
the image it projects, as illustrated in Figure
8.15
. Thus, we can compute the internal
and external parameters of the projector using a clever approach: we
project
a static
image of a checkerboard or a grid onto an empty white plane that is moved around
the scene [
240
].
For each position of the plane, the camera views a skewed checkerboard, and we
compute the projective transformation
H
i
mapping the skewed camera image to the
rectilinear projected image. By collecting the projector-to-camera correspondences
for all the positions of the plane, we can easily estimate the fundamental matrix