Graphics Reference
In-Depth Information
We can obtain improved solutions to the problems of interpolating missing mark-
ers and merging trajectories by leveraging our knowledge of the underlying human
skeleton that generates the marker trajectories, instead of treating them as generic
signals. We return to the issue in Section
7.4
, after defining this skeletal relationship
in the next section.
7.3
FORWARD KINEMATICS AND POSE
PARAMETERIZATION
While a motion capture system returns the 3D trajectories of each marker, this infor-
mation is rarely directly useful to an animator. Instead, we prefer to estimate the
pose
of a character, as described by the joint angles of an articulated skeleton of the
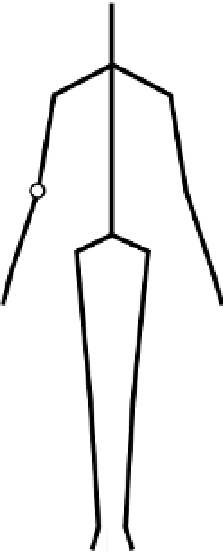
human body, as pictured in Figure
7.8
. The skeleton is made of rigid elements (i.e.,
bones) connected by joints. Each joint is classified as
spherical
, meaning that it has
three degrees of rotational freedom (such as the ball-and-socket joints of the hip and
shoulder), or
revolute
, meaning that it has one degree of rotational freedom (such as
its joints form a
kinematic model
of the body. A kinematic model is generally much
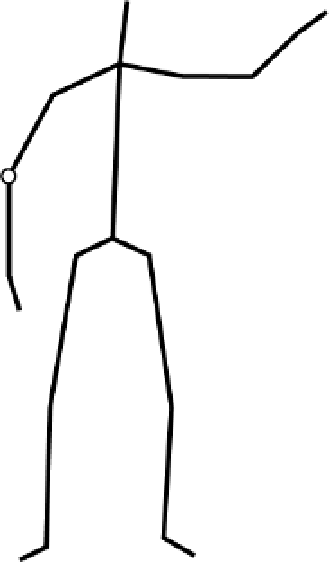
Figure 7.8.
A kinematic model of the human body. Spherical joints are indicated as gray circles
and revolute joints are indicated as white circles. The root of the kinematic model is shown as
the large gray circle. End effectors are shown as black circles.
7
These are in fact highly simplified approximations to the underlying biomechanics of the skeleton.
For example, the human shoulder complex is actually composed of three joints, some of which slide
as well as rotate, and the wrist and ankle have more degrees of freedom than a simple hinge.