Graphics Reference
In-Depth Information
C
2
C
3
C
1
C
4
X
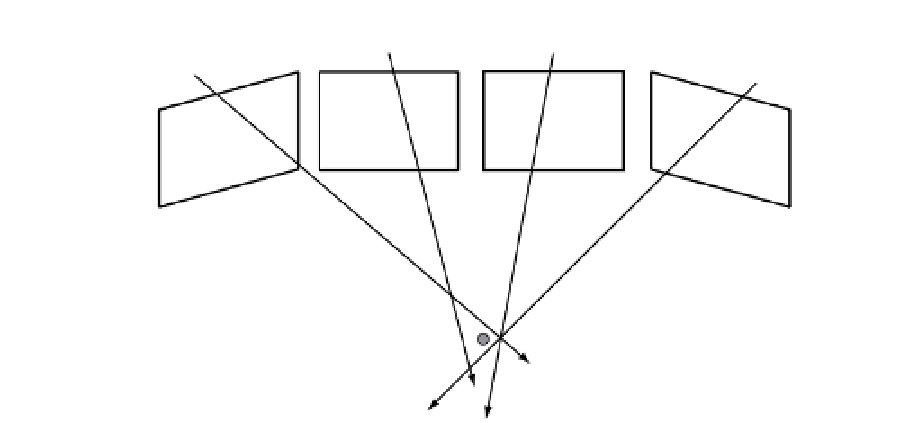
Figure 7.6.
Triangulation for motion capture. A good initial guess is the 3D point that minimizes
the sum of squared distances to the
M
rays from each camera.
If the number of cameras that see a certain marker is too small (e.g., due to body
self-occlusions) or the images of the markers are of low quality (e.g., due to very fast
motion resulting in marker blur), then some of the markers' 3D locations may be
noisy, or in the worst case, entirely missing. Raw motion capture data often must
be semiautomatically processed after acquisition to ensure that each marker has a
complete 3D
trajectory
. The most straightforward approach is to treat the triangu-
lated positions of a particular marker
j
as samples of a three-dimensional time series,
X
j
. We can then apply all the tools of one-dimensional signal processing to the
X
,
Y
and
Z
samples. For example, a B-spline can be fit through the 3D sample loca-
smooth curves to partial marker trajectories and extrapolating can also help deter-
mine whether broken trajectories caused by a long string of missing markers should
be merged, as illustrated in Figure
7.7
b.
Alternately, Liu and McMillan [
295
] proposed to leverage a large set of training
data and approach filling in missing markers as a learning problem. First, a database
of
K
3D marker sets is collected; each set is represented as a complete 3
N
(
t
)
×
1 vector
corresponding to the
N
observed 3D marker locations
.
Principal component analysis (PCA)
is applied to this collection of vectors to build
a linear model
{
X
j
=
(
X
j
,
Y
j
,
Z
j
)
,
j
=
1,
...
,
N
}
X
=
U
β
+
µ
(7.3)
where
U
isa3
N
×
k
matrix of orthogonal mode vectors,
µ
is the 3
N
×
1 average
of all the observations, and
1 parameter vector that controls the model.
Typically
k
can be chosen much smaller than
K
since the marker positions contain
many correlations induced by the underlying human skeleton.
Now suppose that at a given instant we only observe the first
N
markers and need
to obtain estimates of the missing
N
β
is a
k
×
N
markers. We can split the linear model in
−
6
Any other form of scattered data interpolation can be applied, as described in Section
5.2
.