Graphics Reference
In-Depth Information
(a)
(b)
(c)
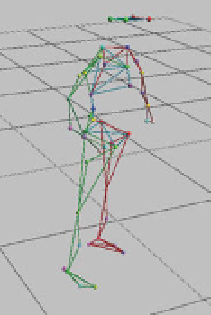
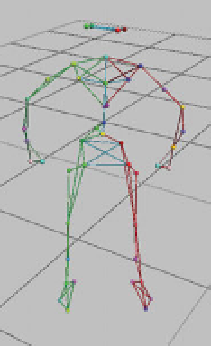
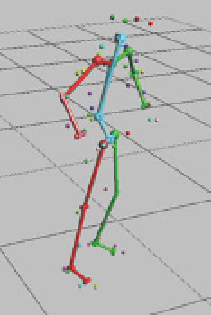
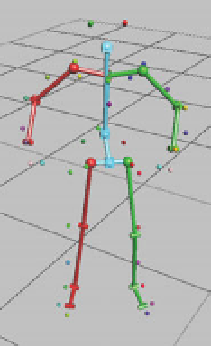
(d)
Figure 7.1.
The motion capture problem. (a) A performer wearing a suit of markers is imaged by
several calibrated cameras. (b) The markers are detected and triangulated to determine their 3D
positions. (c) The markers are fit to a skeleton that can help to drive (d) a 3D animated character.
We begin by describing a typical motion capture environment, including the
acquisition hardware and marker configuration for a human body (Section
7.1
).
We then discuss the processing of the cameras' images to produce 3D time-varying
locations of each marker, including simple heuristics for estimating the positions of
missing markers (Section
7.2
). Next, we describe how to parameterize the
pose
of
a human with the relative joint angles of an articulated skeleton (Section
7.3
). We
address the transformation from the world coordinate system of the 3D markers to
the parameters of this skeleton by solving a nonlinear optimization problem based
on
inverse kinematics
(Section
7.4
).
We often want to stitch separate captured motions together or make minor alter-
ations to a motion while preserving its unique details. We discuss such general
problems of
motion editing
in Section
7.5
. While the focus of the chapter is on
motion capture for the entire human body, we briefly discuss the unique challenges
of facial motion capture in Section
7.6
.
Finally, we introduce the problem of
markerless motion capture
— that is, the
estimationof humanpose fromnatural video, without any special clothingormarkers
(Section
7.7
). This area of computer vision has a massive literature; researchers have
been interested in finding humans in images and tracking them through video for
decades. However,markerlessmotioncapture (at least for entirebodies) is rarelyused