Graphics Reference
In-Depth Information
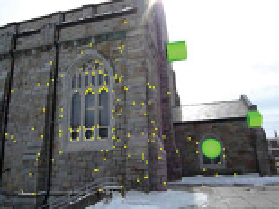
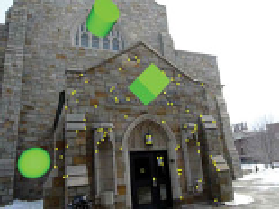
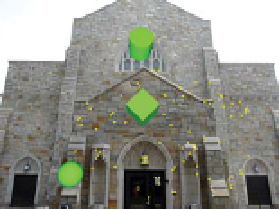
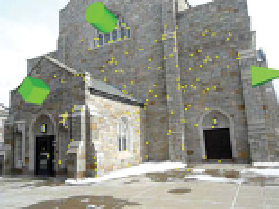
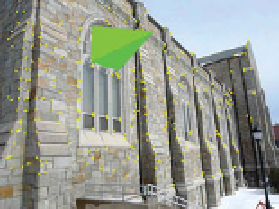
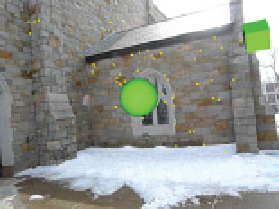
Figure 6.18.
Test objects rendered into the scene are used to verify the quality of a matchmove
result. The new objects appear to “stick to” the scene at the correct locations. Feature points
tracked through the sequence to obtain the matchmove result are also illustrated as yellow dots.
6.6
EXTENSIONS OF MATCHMOVING
Matchmoving is typically solved off-line (i.e., well after the data is collected) and
applied to a sequence of closely spaced images. Here, we briefly discuss extensions
in which each constraint is relaxed. First, we address real-time matchmoving, which
could be used for adding computer-generated 3D elements to live video from a mov-
ing camera. Another application is live pre-visualization of how real video elements
interact with computer-generated ones (e.g., augmented reality). The second exten-
sion is to structure frommotion on large, unordered image datasets that don't come
from a video sequence, such as Internet photo collections. We discuss new tools for
camera localization by exploiting such large collections.
6.6.1
Real-Time Matchmoving
The sequential techniques for projective reconstruction discussed in Section
6.5.1.2
can be viewed as real-time techniques, in the sense that they are
causal
; that is, they
only depend on image frames up to and including the current one. However, we still
need to upgrade the projective reconstruction to a Euclidean one, which requires
either foreknowledge of the camera calibration matrix at each point in time, or a