Graphics Reference
In-Depth Information
to the four constraints on the form of each
ω
i
, namely:
P
i
QP
1
P
i
QP
2
ω
(
1, 1
)
=
ω
(
2, 2
)
=⇒
=
(6.51)
i
i
i
i
P
i
QP
2
ω
(
1, 2
)
=
0
=⇒
=
0
(6.52)
i
i
P
i
QP
3
ω
(
1, 3
)
=
0
=⇒
=
0
(6.53)
i
i
P
i
QP
3
ω
i
(
2, 3
)
=
0
=⇒
=
0
(6.54)
i
Therefore, we need at least three views (i.e., eight equations) to obtain a solu-
tion. If we have many views, then we have an overdetermined linear system that
can be solved using the same Direct Linear Transform approach we've used for pre-
vious problems. We need to make sure that the
Q
we obtain is rank-3 (using the
same approach we used to make sure the estimated fundamental matrix was rank-2
in Section
5.4.2
). Once we obtain
Q
, then the relationships in Equation (
6.46
) and
Equation (
6.48
) allow us to recover the elements of
H
, and thus obtain all the cam-
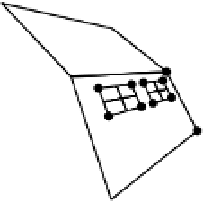
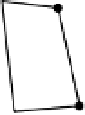
upgrading a scene containing a wireframe house from a projective reconstruction
to a Euclidean reconstruction. That is, we are illustrating the estimated points
X
j
before and after applying the 3D projective transformation
H
−
1
. We can see that
qualitatively, the projective reconstruction is not useful while the Euclidean one is.
The algorithm just discussed was proposed by Pollefeys et al. [
366
] and is
widely used to solve the self-calibration problem, though other methods exist (see
Section
6.8
). If we know less about the cameras' varying internal parameters (for
example, only that the skew is zero), then we can still apply constraints based on
Equation (
6.48
); however, the algorithms are not typically linear. For example, we
can directly minimize a nonlinear function of the unknown 3
×
1 vector
v
and the
(a)
(b)
Figure 6.13.
Upgrading a projective reconstruction of a set of points in (a) to a Euclidean recon-
struction in (b). Even though the upgrade is obtained by analyzing the projective cameramatrices,
it's easier to visualize the effects of the upgrade by looking at the reconstructed scene points.
20
However, since we are typically solving an overconstrained problem with noisy input camera
matrices, the solution we obtain is only approximate and the resulting
K
i
may not exactly be in the
required form. We'll take care of this during bundle adjustment in the next section.