Graphics Reference
In-Depth Information
Extrinsic parameters
(world−centered)
5
Extrinsic parameters (camera−centered)
450
8
3
3
1
150
1
5
50
300
−50
O
c
Z
c
8
−150
X
c
150
Y
c
−200
500
0
300
200
100
0
0
200
100
X
world
Y
world
150
0
(a)
(b)
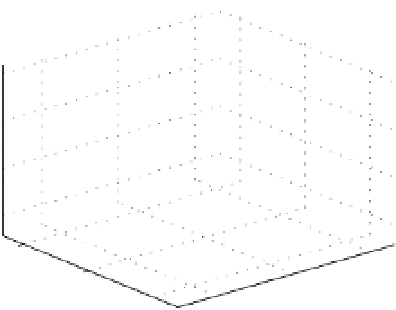
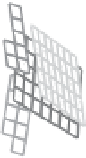
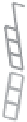
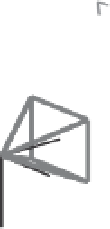
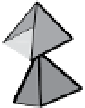
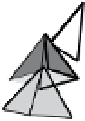
Figure 6.7.
Results of camera calibration. (a) The estimated positions of the calibration pattern
for the views in Figure
6.6
, assuming the camera is in fixed position. (b) Alternately, we can
think of the plane being in fixed position and show the estimated positions and orientations of
the cameras. The units of the coordinate systems are mm.
6.4
STEREO RIG CALIBRATION
Next, we discuss the calibration of two rigidly mounted cameras, also known as a
stereo rig
. That is, the cameras maintain the same relative orientation and position
with respect to each other by being secured together in a fixed housing. Such cameras
have recently become popular for filming 3D movies, as described in Section
5.9
.
The key estimation problem is the determination of the internal parameters of each
camera and the relative rotationmatrix and translation vector relating the pair. Once
we know this information, we can determine the 3D location of a point from its 2D
projections in each image using
triangulation
.
As we discussed in Section
5.4.1
, the relationship between correspondences for a
pair of cameras is entirely encapsulated by the
fundamental matrix
, which defines
the epipolar geometry. We can immediately see a problembased on counting degrees
of freedom: we have fourteen degrees of freedom for the cameras (four for each
camera calibration matrix and six for the relative rotation and translation), but the
fundamental matrix only has seven degrees of freedom. Even if we assume that both
cameras have exactly the same (unknown) calibration matrix
K
, we still have extra
degrees of freedom. Therefore, while the fundamental matrix for an image pair is
unique (up to scale), there are many (substantially) different camera configurations
that result in the same fundamental matrix. Therefore, we will inevitably face
ambi-
guities
in the camera matrices unless we obtain additional information about the
cameras or the environment.