Graphics Reference
In-Depth Information
Image 1
Image 3
Image 5
Image 8
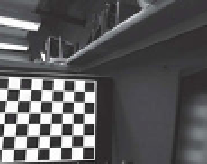
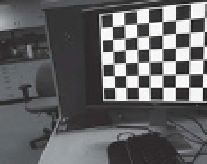
Figure 6.6.
Example images used for plane-based internal parameter estimation, with corre-
sponding features at the square corners automatically detected and matched.
In this form, we can see that the relationship between the point on the planar sur-
face, specified by its world coordinates
)
through a
projective transformation
H
. This stands to reason, since in Section
5.1
we noted that images of a planar surface are related by projective transformations.
For any given position of the camera, we can estimate the projective transforma-
tion relating theworld planar surface to the image plane by extracting features in each
The actual physical coordinates of theworldpoints aren't important as long as the rel-
ative distances between themare correct. For example, for a checkerboard of squares,
we can define the corners of the upper left square to be
(
X
,
Y
)
, is related to the image coordinate
(
x
,
y
(
0, 0
)
,
(
0, 1
)
,
(
1, 0
)
,
(
1, 1
)
,
and so forth.
At this point, we've estimated a projective transformation
H
i
for every view of the
planar calibration pattern. Let's see how these projective transformations will help
us estimate the internal parameters. Rearranging Equation (
6.19
), we have:
r
1
r
2
t
i
]=
λ
i
K
−
1
H
i
=
λ
i
K
−
1
[
(6.20)
h
i
1
h
i
2
h
i
3
]
[
where we've denoted the columns of
H
i
as
h
i
1
,
h
i
2
,
h
i
3
. We also introduced a scale factor
λ
i
to account for the
operation. The parameters
r
1
,
r
2
,
t
i
are columns of the rotation
matrix and the translation vector corresponding to the
i
th
position of the camera.
Recall that the camera calibration matrix
K
is fixed for all views.
We know that in a rotation matrix, each column vector is unit norm and that the
columns are orthogonal. That is:
∼
r
i
1
r
1
=
r
i
2
r
2
=
r
i
1
r
2
=
1
0
(6.21)
From Equation (
6.20
), these constraints turn into constraints on the columns of
H
i
:
h
i
1
KK
)
−
1
h
i
1
=
h
i
2
KK
)
−
1
h
i
2
(
(
(6.22)
h
i
1
KK
)
−
1
h
i
2
=
(
0
We see that Equation (
6.22
) directly relates the projective transformation for each
view to the internal parameters of the camera. If we define the special 3
×
3 symmetric
matrix
KK
)
−
1
ω
=
(
(6.23)
7
Harris corners will performwell for finding corners of a checkerboard.