Graphics Reference
In-Depth Information
t = 0 (original)
t = 0.3 (synthesized)
t = 0.7 (synthesized) t = 1 (original)
(a) (b)
Figure 5.27.
(a) The camera configuration for view interpolation. The white image planes rep-
resent the original images and the striped image plane represents the synthesized image. The
image planes are all parallel to each other and to the baseline. (b) The outlined upper right
and lower left images are synthesized from the upper left and lower right images using view
interpolation, and are physically consistent with the underlying scene.
C
B
A
Source
Synthesized
Source
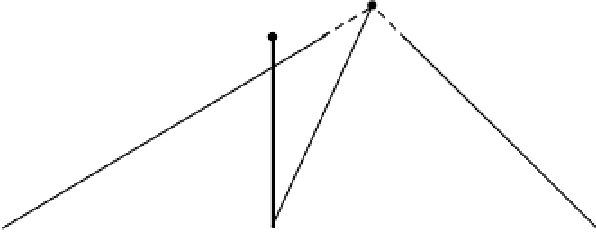
Figure 5.28.
Folds and holes can be introduced in the synthesized view based on changes in
visibility. Points
A
and
B
create a fold, since they both map to the same point in the synthesized
view. We select the intensity from
A
since it has a larger disparity. Point
C
creates a hole, since
it is visible from the synthesized viewpoint but neither source viewpoint.
Seitz and Dyer [
434
] generalized view interpolation to allow physically consistent
view synthesis under the relaxed constraint that the source and synthesized camera
centers are collinear, as illustrated in Figure
5.29
a. They observed that image planes
with arbitrary orientations could be made parallel to each other and to the line con-
necting the camera centers by applying rectifying projective transformations (called
prewarps
), which we discussed in Section
5.4.3
. After rectification, the conditions for
view interpolation are met, as illustrated in Figure
5.29
b.
We now apply view interpolation to the rectified images and apply a final projec-
tive transformation (called a
postwarp
) to the synthesized view to effectively rotate
the virtual camera. Seitz and Dyer called this algorithm
view morphing
. Figure
5.30
illustrates an example of view morphing; we can see that the prewarps and post-
warps enable view synthesis in situations where the source images are quite different