Graphics Reference
In-Depth Information
q
i
q'
i
q'
i
q'
j
β
i
β
i
x'
i
x
x'
i
α
i
x'
j
α
i
p
i
p'
i
p'
j
p'
i
I
1
I
2
I
2
(a)
(b)
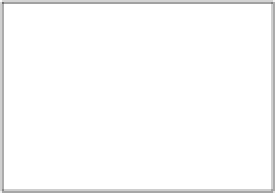
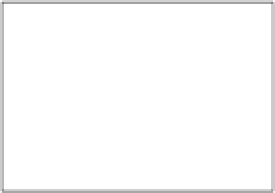
Figure 5.24.
(a) Field morphing for a single line pair.
α
i
is the projection's relative distance from
p
i
to
q
i
.
β
i
is the signed distance to the line segment. (b) When we have more than one line
segment pair, each pair generates an estimate for the location
x
.
Formally, let's consider a set of oriented line segments
{
(
p
i
,
q
i
)
,
i
=
1,
...
,
n
}
in
I
1
,
2
are the starting and ending points of each line segment. The
matching line segments in
I
2
are givenby
where
p
i
and
q
i
∈ R
p
i
,
q
i
)
{
(
,
i
=
1,
...
,
n
}
. Beier andNeely defined
2
in the first image as a weighted average
involving the distance of
x
to each line segment in
I
1
.If
x
is very close to one of the
segments in
I
1
, the weight is very high, forcing the correspondence to lie very close to
the matching line segment in
I
2
.
Figure
5.24
a illustrates the idea for a point
x
in
I
1
and a single pair of line segments
fwd
at a point
x
the motion vector
(
u
,
v
)
∈ R
p
i
,
q
i
)
}
{
(
p
i
,
q
i
)
,
(
. We perform a change of coordinates for the point
x
, so that
α
i
is
the relative distance along the line segment, and
β
i
is the signed absolute distance
perpendicular to the line segment. That is, at
p
i
,
1. Points whose
projection onto the line defined by the segment is on the segment have 0
α
i
=
0 and at
q
i
,
α
i
=
≤
α
i
≤
1,
while points whose projection is outside the segment have
1.
The corresponding point
x
i
in
I
2
is created by traveling the relative distance
α
i
<
0or
α
i
>
α
i
p
i
,
q
i
)
along the segment
β
i
perpendicular to the
segment. In this way, a single line segment match generates a dense correspondence
field for the entire image. Thus, the flow vector
(
and the signed absolute distance
at
x
is
x
i
−
(
u
i
,
v
i
)
x
.
When we have multiple line segments, as illustrated in Figure
5.24
b, we have
multiple estimates
x
i
corresponding to each line segment match. The final point
x
is
a weighted average of these location estimates, computed as
w
i
x
i
n
n
x
=
w
i
(5.63)
i
=
1
i
=
1
where Beier and Neely defined the weights as
c
a
2
p
i
−
q
i
w
i
=
(5.64)
b
+
d
i
(
x
)
is the non-negative distance from the point
x
to line segment
i
in
I
1
,
and
a
,
b
,
c
are user-defined constants. If
a
is 0, the length of a line segment has no
effect on the weight computation; if
a
is 1 or larger, longer lines have more weight.
b
is a small number that ensures Equation (
5.64
) is defined even for points exactly on
a line segment.
c
determines how quickly the influence of a line segment decreases
with distance and is usually in the range
Here,
d
i
(
x
)
[
]
1.0, 2.0
.