Graphics Reference
In-Depth Information
B
A
B
A
B
A
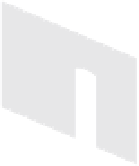
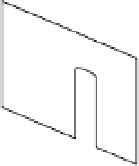
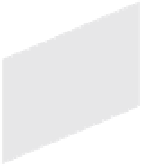
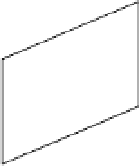
Figure 5.17.
The double nail illusion. Point
A
(on the foreground object) and point
B
(on the
backgroundwall) appear in different order in the left and right images. This phenomenon typically
occurs with thin vertical objects close to the cameras.
built a Bayesian model for the disparity estimation problem from first principles,
with respect to multiple occluding objects that may have sharp interior depth edges
(creases). This led to an explicit prior distribution on disparities that could be
incorporated into a dynamic programming problem for each scanline.
Dynamic programming approaches overcome many of the limitations of winner-
take-all techniques; they can deal naturally with low-contrast regions and avoid the
multiple-match problem. However, a major issue is enforcing the consistency of
disparities across neighboring scanlines, since dynamic programming only applies
to matching two one-dimensional signals. While many authors (including [
352
,
37
])
proposed ways of enforcing consistent disparities across scanlines, these methods
inevitably produce undesirable “streaky” disparitymaps that come from inconsistent
estimates between adjacent rows. The global methods in the next sections operate
directly in the 2D image plane, and neither suffer from these artifacts nor require the
monotonicity assumption.
5.5.2
Optimization with Graph Cuts
As mentioned in Section
2.8
, the work of Boykov and colleagues (e.g., [
59
,
61
]) at the
turn of the century generated an explosion of interest in graph-cut-based techniques
for computer vision, including stereo correspondence. Several researchers (e.g.,
Ishikawa and Geiger [
214
] and Roy and Cox [
406
]) had previously proposed graph-cut
formulations for global optimization applied to the stereo problem. However, their
formulations only allowed a certain class of cost function whose smoothness term
could not accurately model behavior at object boundaries (or
discontinuities
). Con-
sequently, disparity maps from such algorithms still contained visible artifacts. Also,
the monotonicity assumption was still required.
Boykov et al. [
61
] proposed a very well-known graph-cut-based stereo algorithm.
The fundamental mechanism is
α
-expansion
, mentioned in Section
3.3
and reviewed