Graphics Reference
In-Depth Information
and line correspondences, resulting in a high-quality dense correspondence field
for the entire image sequence. An example result of this approach is illustrated in
Figure
5.9
.
5.4
EPIPOLAR GEOMETRY
We now consider a special case of the optical flow problem in which the two images
That is, any differences in the positions of corresponding points is entirely due to the
underlying camera motion. In this special case, we don't need to search across the
entire image to estimate the motion vector
. In fact, there is only one degree of
freedom for the possible location of a point in
I
2
corresponding to a fixed point in
I
1
.
This important constraint is described by the
epipolar geometry
relating the image
pair. In this section, we introduce the epipolar geometry and the constraints it puts
on feature matches. In the next section, we return to the optical flow problem in this
special case, which is called
stereo correspondence
.
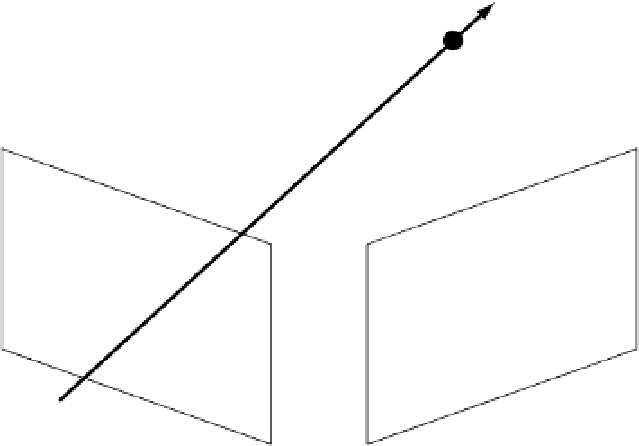
Figure
5.10
illustrates the situation, illustrating the image planes of the two cam-
eras, a scene point
P
, and its projection
(
u
,
v
)
on the first image plane. Any point
on the ray extending from the optical center of the first camera through
P
will project
to the same position
(
x
,
y
)
. This line, when viewed from the second camera, generates
the
epipolar constraint
mentioned earlier. That is, the correspondence
(
x
,
y
)
x
,
y
)
must
occur somewhere along this line (called an
epipolar line
). Similarly, any point in the
second image must have its correspondence on an epipolar line in the first image.
Of course, if we don't know the positions and orientations of the cameras that took
the images, it seems like we can't determine the location of the epipolar line for a
(
P
(x',y')
(x,y)
I
1
I
2
Figure 5.10.
When two images are taken at exactly the same time, the correspondence of a
point
(
)
in the first image (corresponding to the 3D point
P
in the scene) must occur along a
special line in the second image (the epipolar line corresponding to
(
x
,
y
x
,
y
)
).
8
Or equivalently, the same camera changes position while looking at a static scene. We assume the
cameras use the perspective projection model (discussed further in Chapter
6
).