Graphics Reference
In-Depth Information
points in its neighborhood. This means that new control points can be added in one
place without changing the interpolation far away. Thus,
3
3
f
(
x
,
y
)
=
w
kl
(
x
,
y
)ψ
kl
(
x
,
y
)
(5.12)
k
=
0
l
=
0
for appropriate basis functions
(usually cubic polynomials), and
k
and
l
that define
which basis functions are active at pixel
ψ
.
Lee et al. [
267
] described the details of computing the B-spline basis functions
and weights for scattered data interpolation, and proposed a method for adaptively
varying the resolution of the control point lattice to avoid a very large number of
basis functions. Depending on the algorithm settings, the B-spline can either exactly
interpolate the feature matches, or merely approximate the matches to a desired
tolerance (which generally allows a coarser lattice). Further details about the B-spline
interpolation process can be found in the topic by Farin [
135
].
(
x
,
y
)
5.2.3
Diffeomorphisms
Joshi and Miller [
228
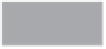
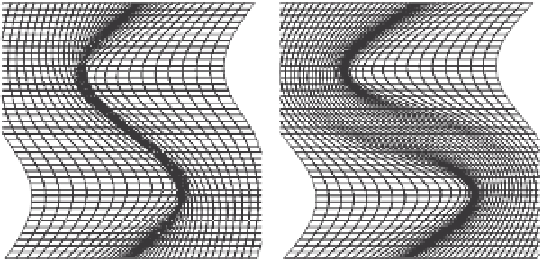
] noted that the thin-plate spline approach is not guaranteed
ture matches is extreme. Figure
5.4
a-b illustrates a simple example of the problem;
the deformation field corresponding to the thin-plate spline causes the grid lines in
the center to intersect themselves. Instead, the deformation field can be computed
as the solution of a ordinary differential equation. The idea is to “flow” the first image
I
1
. This flow can be rep-
resented by an instantaneous velocity field at each point in time,
(
x
,
y
)
to the second image
I
2
(
x
,
y
)
over a time interval
t
∈[
0, 1
]
(
u
(
x
,
y
,
t
)
,
v
(
x
,
y
,
t
))
,
where
t
∈[
0, 1
]
, and a mapping
S
(
x
,
y
,
t
)
that specifies the flowed location of each
point
(
x
,
y
)
at time
t
.At
t
=
0 we have the image
I
1
and at
t
=
1 we have the image
I
2
.
(a)
(b)
(c)
Figure 5.4.
(a) Two feature correspondences in a pair of images. The black dot moves to the
left while the white dot moves to the right. (b) A thin-plate spline interpolant results in a non-
diffeomorphic deformation field — that is, the grid lines self-intersect. (c) Forcing the mapping
to be a diffeomorphism avoids this self-intersection.
5
That is, a one-to-one, differentiable mapping whose inverse is also differentiable.