Graphics Reference
In-Depth Information
(a)
(b)
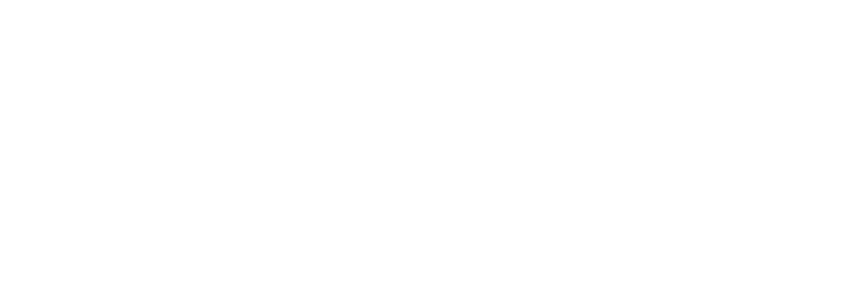
Figure 4.10.
(a) A sampling of extrema of the multi-scale DoG function for the image in
Figure
4.6
a prior to feature rejection. The size of the circle illustrates its detected scale. (b)
After feature rejection, low-contrast and edge-like features are removed. 110 of 777 original DoG
extrema passed the rejection tests.
given by
=−
−
1
g
(
x
i
,
y
i
,
σ
i
)
ˆ
x
i
ˆ
y
i
σ
i
(4.31)
Thus, features are located with sub-pixel accuracy.
3. Finally, we reject features that have poor contrast or correspond to edges
rather than blobs. For the contrast issue, we simply remove features for which
the function
Q
in Equation (
4.30
) is too small. To remove edge-like features,
we consider the eigenvalues of the 2
2 spatial Hessian and reject features
for which one eigenvalue is much larger than the other — that is, the local
bowl approximation to
D
is too oblong. To avoid explicitly computing the
eigenvalues, Lowe proposed a measure based on the trace and determinant
of the Hessian, analogous to the Harris function in Equation (
4.4
).
×
Figure
4.10
illustrates DoG features detected at multiple scales using this tech-
nique. We can see that, like the LoG and Hessian-Laplace detectors, the DoG feature
detector qualitatively detects blobs. As with these other feature detectors, each fea-
ture carries with it an associated scale that is used in the subsequent description and
matching processes. Each feature that survives the rejection tests is also assigned
a dominant orientation; we will discuss this process further in Section
4.2.3
. Fea-
tures detected in this way are sometimes called
SIFT features
, where SIFT stands for
Scale-Invariant Feature Transform.
4.1.5
Affine-Invariant Regions
Scale-invariant features such as Hessian-Laplace, LoG, andDoGare usually adequate
for dealing with images sampled close together in time and acquired by a zooming
camera. However, when images to be matched are acquired using a
wide baseline
—
that is, the camera undergoes substantial translational motion between acquiring
the images — scale invariance alone may not be sufficient. Figure
4.11
illustrates
the problem. A square centered at a point in the left-hand image contains different