Digital Signal Processing Reference
In-Depth Information
independent because the condition is satisfied only for
M < N ¼
3.
Therefore, the condition for
M ¼ N ¼
3 should be added:
f
X
1
X
2
ðx
1
; x
2
; x
3
Þ ¼ f
X
1
ðx
1
Þf
X
2
ðx
2
Þf
X
3
ðx
3
Þ:
(3.375)
However, the condition (
3.375
) itself includes the conditions
(
3.338
)-(
3.340
). As a consequence, the condition (
3.375
) is a necessary
and sufficient condition for the independence of three random variables.
A.3.9. Yes. However, in this case, it is more comfortable to work with the
corresponding joint probabilities rather than either joint PDFs or
distributions [LEO94, pp. 206-207]. The following example, adapted
from [LEO94, pp. 206-207], illustrates the concept.
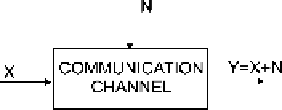
The input to the communication channel (Fig.
3.39
) is a discrete random
variable
X
with the discrete values:
U
and -
U
(the polar signal) and the
corresponding probabilities
P
{
U
}
¼ P
{
U
}
¼
1/2. The uniform noise
N
over the range [
a
,
a
] is added to the signal
X,
resulting in the output of the
channel
Y ¼ X
+
N
. Find the probabilities
PfðX ¼ UÞ\ðY
0
Þg
PfðX ¼UÞ\ðY
0
Þg:
(3.376)
Using the conditional probabilities we can rewrite the probabilities
(
3.376
)as:
PfðX ¼UÞ\ðY
0
Þg¼PfY
0
jX ¼Ug PfX ¼Ug¼PfY
0
jX ¼Ug
=
2
:
PfðX¼UÞ\ðY
0
Þg ¼PfY
0
jX¼Ug PfX¼Ug¼PfY
0
jX¼Ug
1
=
2
(3.377)
1
The input random variable
X
is a discrete random variable, while the output
random variable
Y
is a continuous random variable. The conditional
variables are also continuous:
Y
1
¼ Y
|
U
and
Y
2
¼ Y
|
U
.
The PDFs of the noise and the variables
Y
1
and
Y
2
are shown in
Fig.
3.40
.
From Fig.
3.40
, we get:
PfY
0
jX ¼ Ug ¼ Ua
j
j=
2
a ¼ PfY
0
jX ¼Ug ¼ aU
j
j=
2
a:
(3.378)
Finally, from (
3.377
) and (
3.378
), we have:
Fig. 3.39
Communication
channel with added noise
Search WWH ::

Custom Search