Hardware Reference
In-Depth Information
70
35
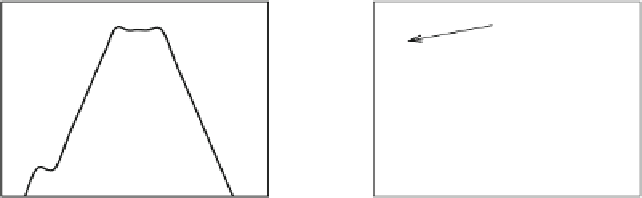
Vehicle approaching
60
30
50
25
40
30
20
20
15
10
0
10
30
35
40
45
50
55
60
65
70
75
30
35
40
45
50
55
60
65
70
75
a
b
Time [seconds]
Time [seconds]
35
35
30
30
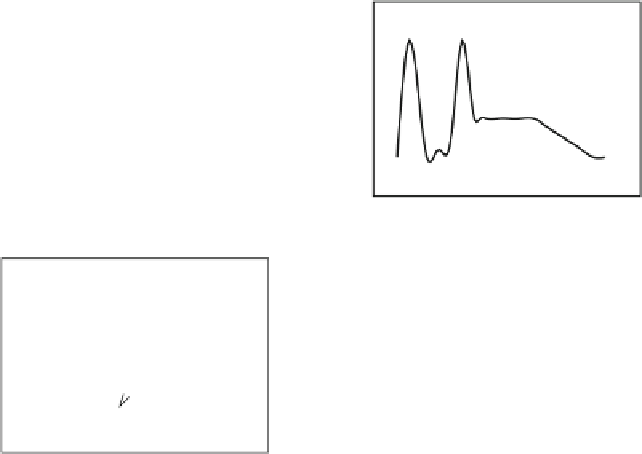
User deactivates the view
25
25
20
20
15
15
10
10
30
35
40
45
50
55
60
65
70
75
30
35
40
45
50
55
60
65
70
75
c
d
Time [seconds]
Time [seconds]
Fig. 9.6
Car speed and QoS for the urban case-study.
a
Car Speed,
b
Left camera,
c
Center camera,
d
Right camera
the QoS requirements while minimizing the power consumption without exceeding
the amount of computational resources physically available on the MPSoC platform.
Figure
9.7
shows the selected MPEG4 encoder configurations in terms of number
of allocated ADRESs and their average operating frequency set by the RRM for the
three video streams given the driving pattern presented in Fig.
9.6
.
Figure
9.8
reports also the power consumption of the overall MPSoC platform
together with the penalties on the video stream requirements (i.e., the difference
between the required frame rates and the achieved ones).
When the frame rate requirement is 15
fps
, the RRM can set either a three-
resources low frequency configuration or a one-resource high frequency configura-
tion. In a normal stationary situation, the RRM provides one resource to the left
camera and three resources to the central and right camera.
When a vehicle is in proximity of the left camera, the QoS requirement of this
camera is of 30
fps
. To fit in this requirement, the RRM has to set the left cam-
era MPEG4 encoder in an operating configuration with many cores operating at
high frequency. For these cases, required resources are taken from other video-
streams which will move to a configuration with low resources and high frequency.
In the overall system there will be many cores operating at high frequency and these
situations are clearly characterized by peaks in the power consumption as visible in
Fig.
9.8
a.





































































































































Search WWH ::

Custom Search