Hardware Reference
In-Depth Information
The frame rate requirements are not continuously updated but new requirements
are communicated only when the vehicle speed passes certain thresholds or when
another vehicle enters/exits the proximity areas. There is a threshold every 10 km/h
for the lateral cameras and every 20 km/h for the central camera.
We here recall from Chap. 5 that the RRM needs also application priorities to
decide which requirement should be relaxed when would be otherwise impossible
to solve the RRM problem matching all requirements given the limited amount of
system resources. The CSU communicates to the MPSoC platform also the priorities
of the multiple video streams together with the frame rate requirements. By default
the highest priorities are given to the central and left cameras. When a vehicle is in
proximity, then the lateral camera closer to the approaching vehicle and the central
camera get the highest priorities.
9.3
Platform Description
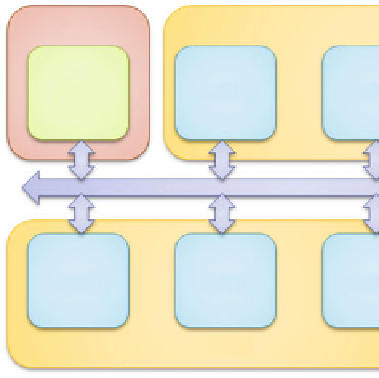
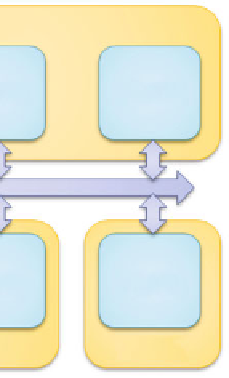
The industrial architecture studied is the 8-cores MPSoC shown in Fig.
9.4
. The
platform is composed of seven ADRES (coarse-grain Architecture for Dynamically
Reconfigurable Embedded System) cores [
5
] and one StrongARM. The ADRES core
is a power-efficient flexible computing element which combines a coarse-grain array
with a VLIW DSP. The MPEG4 application has been optimized for compilation for
the ADRES core in such a way that the data-flow loops can be efficiently accelerated
by exploiting the coarse-grain array for loop level parallelization. The potentialities
of the ADRES cores are fully exploited by executing the MPEG4 encoder instances
while the RRM is executed on the StrongARM processor. The on-chip interconnect
consists of a 32-bit wide Network-on-Chip with two switches.
RRM
MPEG4
Strong
ARM
ADRES
ADRES
ADRES
ADRES
ADRES
ADRES
ADRES
MPEG4
MPEG4
Fig. 9.4
Target MPSoC platform executing the RRM and the three MPEG4 encoder instances
Search WWH ::

Custom Search