Hardware Reference
In-Depth Information
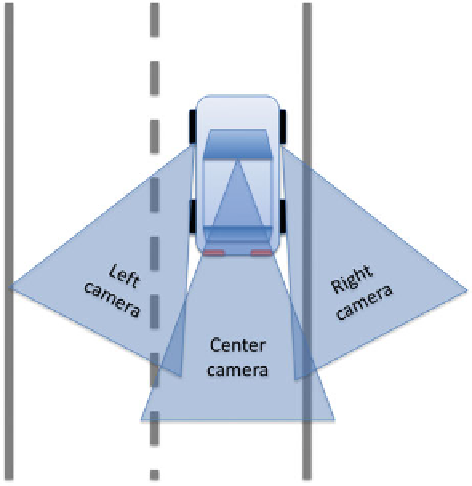
Fig. 9.3
Mirror views of the
target vehicle
These cameras are connected to the target ADRES-based MPSoC platform which
performs the encoding of the three video streams by means of the MPEG4 encoder
presented in Sect.
9.2.1
. For this purpose, an instance of the MPEG4 encoder is
executed for each of the three views. The encoded streams are then sent to an off-chip
Central Safety Unit (CSU), reducing the needs of on-board bus bandwidth.
Moreover, the dashboard has a set of displays that can be used to reproduce the
actual content of the video streams sent to the CSU. Thus, the driver can watch live-
views from the mirror cameras. The driver can independently switch on and off each
of the camera views via the steering wheel interface.
We assume that the minimum requirement needed to let the CSU operating cor-
rectly is 15 frame per second (
fps
) per each video stream. Since this requirement
is too low for providing the driver with a good video quality, the frame rate might
be increased when the mirror views are displayed on the dashboard. In fact, when
live-views are enabled, the CSU communicates new frame rate requirements to the
MPSoC platform performing the video encoding.
In particular, when some live-views are activated, the requirements are decided on
the basis of the vehicle speed and on the proximity of other vehicles. The following
criteria are used:
Lateral cameras: 15
fps
under 10 km/h, 25
fps
for over 110 km/h, interpolated
linearly for intermediate speed. 30
fps
when a vehicle is in proximity.
Center camera: 15
fps
under 20 km/h, 20
fps
over 120 km/h, interpolated linearly
for intermediate speed.
Search WWH ::

Custom Search