Information Technology Reference
In-Depth Information
3.9 Filtering for video noise reduction
The basic principle of all video noise reducers is that there is a certain amount of correlation between the video
content of successive frames, whereas there is no correlation between the noise content.
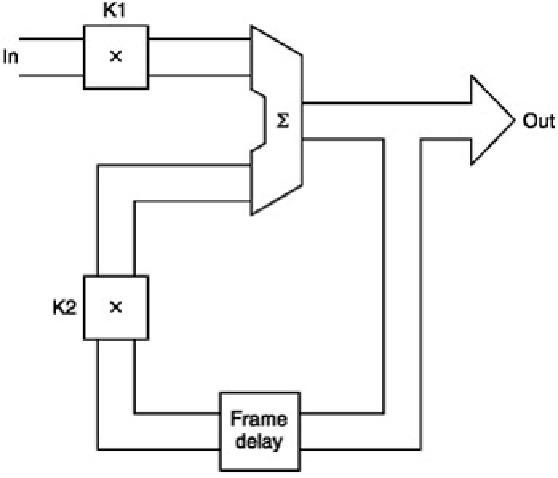
A basic recursive device is shown in
Figure 3.27
. There is a frame store which acts as a delay, and the output of
the delay can be fed back to the input through an attenuator, which in the digital domain will be a multiplier. In the
case of a still picture, successive frames will be identical, and the recursion will be large. This means that the
output video will actually be the average of many frames. If there is movement of the image, it will be necessary to
reduce the amount of recursion to prevent the generation of trails or smears. Probably the most famous examples
of recursion smear are the television pictures sent back of astronauts walking on the moon. The received pictures
were very noisy and needed a lot of averaging to make them viewable. This was fine until the astronaut moved.
The technology of the day did not permit motion sensing.
Figure 3.27:
A basic recursive device feeds back the output to the input via a frame store which acts as a delay.
The characteristics of the device are controlled totally by the values of the two coefficients K1 and K2 which control
the multipliers.
The noise reduction increases with the number of frames over which the noise is integrated, but image motion
prevents simple combining of frames. It will be seen in
section 3.14
that if motion estimation is available, the image
of a moving object in a particular frame can be integrated from the images in several frames which have been
superimposed on the same part of the screen by displacements derived from the motion measurement. The result
is that greater reduction of noise becomes possible.
[
11
]
In a median filter, sample values adjacent to the one under examination are considered. These may be in the same
place in previous or subsequent images, or nearby in the same image. A median filter computes the distribution of
values on all its input points. If the value of the centre point lies centrally within the distribution then it is considered
to be valid and is passed to the output without change. In this case the median filter has no effect whatsoever.
However, if the value of the centre point is at the edge of the distribution it is considered to be in error due to
impulsive noise and a different input point, nearest the mean, is selected as the output pixel. Effectively a pixel
value from nearby is used to conceal the error. The median filter is very effective against dropouts, film dirt and bit
errors.
[
11
]
Weiss, P. and Christensson, J., Real time implementation of sub-pixel motion estimation for broadcast
applications.
IEE Digest
, 1990/128
3.10 Warping
Warping is a technique which allows the texture of an object correctly to be mapped onto its surface. The concept
is simple, whereas the implementation is not.
Figure 3.28
shows a simple example. A flag is stretched absolutely
flat so that the true shape of the pattern can be seen. However, when the flag blows in the wind, the pattern which
can be seen is not the same because the flag is no longer flat. Warping is a technique which,
inter alia
, allows the
appearance of a flag correctly to be computed from a knowledge of what the flag looked like when it was flat.