Information Technology Reference
In-Depth Information
The success of temporal coding depends on the accuracy of the vectors. Trying to reduce the bit rate by reducing
the accuracy of the vectors is false economy as this simply increases the prediction error. Consequently for a given
GOP structure it is only in the the spatial coding that the overall bit rate is determined. The RLC/VLC coding is
lossless and so its contribution to the compression cannot be varied. If the bit rate is too high, the only option is to
increase the size of the coefficient-requantizing steps. This has the effect of shortening the wordlength of large
coefficients, and rounding small coefficients to zero, so that the bit rate goes down. Clearly if taken too far the
picture quality will also suffer because at some point the noise floor will become visible as some form of artifact.
5.13 A bidirectional coder
MPEG does not specify how an encoder is to be built or what coding decisions it should make. Instead it specifies
the protocol of the bitstream at the output. As a result the coder shown in Figure 5.35 is only an example.
Conceptually MPEG-2 Main Profile coding with a progressive scan input is almost identical to that of MPEG-1 as
the differences are to be found primarily in the picture size and the resulting bit rate. The coder shown here will
create MPEG-1 and MPEG-2 bidirectionally coded bitstreams from progressively scanned inputs. It also forms the
basis of interlaced MPEG-2 coding and for MPEG-4 texture coding, both of which will be considered later.
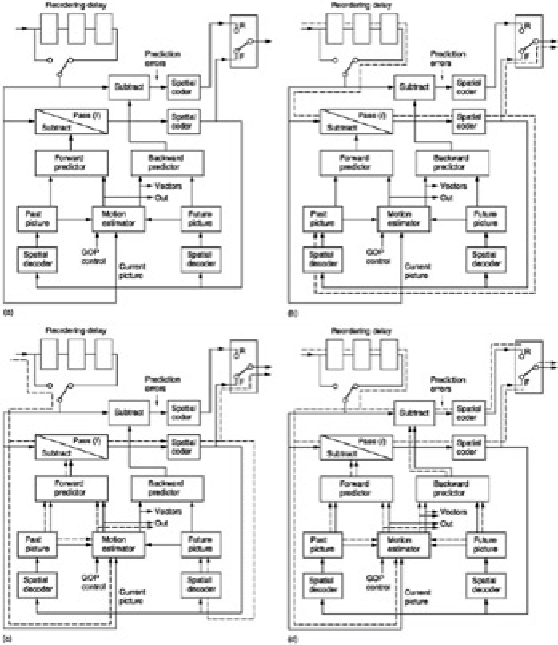
Figure 5.35(a) shows the component parts of the coder. At the input is a chain of picture stores which can be
bypassed for reordering purposes. This allows a picture to be encoded ahead of its normal timing when
bidirectional coding is employed.
At the centre is a dual-motion estimator which can simultaneously measure motion between the input picture, an
earlier picture and a later picture. These reference pictures are held in frame stores. The vectors from the motion
estimator are used locally to shift a picture in a frame store to form a predicted picture. This is subtracted from the
input picture to produce a prediction error picture which is then spatially coded.
The bidirectional encoding process will now be described. A GOP begins with an
I
picture which is intra-coded. In
Figure 5.35(b) the
I
picture emerges from the reordering delay. No prediction is possible on an
I
picture so the
motion estimator is inactive. There is no predicted picture and so the prediction error subtractor is set simply to
pass the input. The only processing which is active is the forward spatial coder which describes the picture with
DCT coefficients. The output of the forward spatial coder is locally decoded and stored in the past picture frame
store.
The reason for the spatial encode/decode is that the past picture frame store now contains exactly what the
decoder frame store will contain, including the effects of any requantizing errors. When the same picture is used as
a reference at both ends of a differential coding system, the errors will cancel out.
Figure 5.35:
A bidirectional coder. (a) The essential components. (b) Signal flow when coding an
I
picture. (c)
Signal flow when coding a
P
picture. (d) Signal flow when bidirectional coding.