Information Technology Reference
In-Depth Information
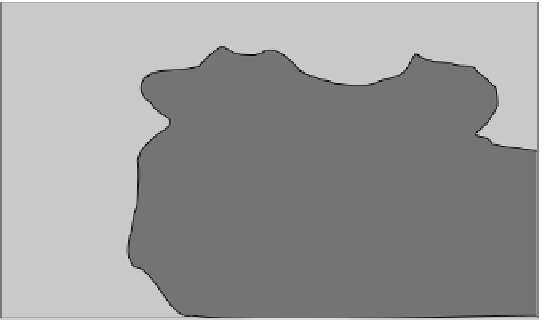
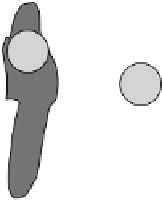
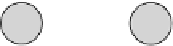
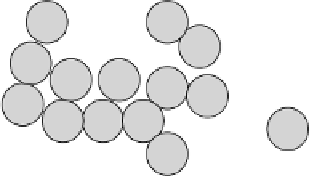
Nonself set
Self-detectors
Figure 4.19 PS approaches. The goal of PS is to cover the self-set with an
appropriate set of detectors.
on the self-sample points. h erefore, a sample point can be classifi ed as belonging
to a cluster by measuring its distance to it. A measure of the distance from a sample
to a cluster may be defi ned in terms of the Euclidean distance to the “cluster cen-
troid.” Another way to defi ne such distance is a “normalized Euclidean distance”
defi ned as
s
K
dist
()
where
K
is the cluster centroid and
σ
K
the standard deviation that represents the
sparseness of the cluster.
A basic positive characterization approach can be defi ned using a nearest
neighbor criterion. A “crisp characterization,” will classify a feature vector as
normal or abnormal. However, a “noncrisp characterization” can be considered by
introducing degrees of “abnormality,” represented by a values in the interval [0, 1],
with 1 indicating “normal” and 0 “abnormal.” h us, a function
µ
nonself
, defi ned on
[0, 1]
n
associate to each feature vector, measures the distance to the nearest self-
sample point. In this case, no additional model of the self-space was considered;
the self-sample points were considered as the defi nition of the self-sub-space. h us,
µ
nonself
is defi ned as
K
nonself
()
x
Dxself
(,
)
min{(,):
dxs
s
∈
self
}
where
d
(
x
,
s
) denotes the distance between
x
and a self-sample point
s
. h us,
D
(
x
,
self
) is the distance from
x
to the closest point in the self-sample set. Other
distance measures such as a “Minkowski metric” can also be used.





























Search WWH ::

Custom Search