Information Technology Reference
In-Depth Information
C
′
C
r
d
r
d
′
D
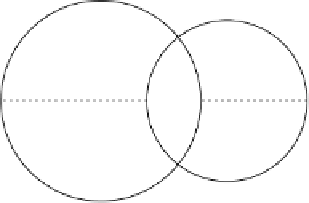
Figure 4.13
The overlap between two detectors
d
and
d
′
is computed in terms
of the distance (
D
) between their centers (
c
,
c
′
) and radii (
r
d
,
r
d
′
).
c
nearest
is the direction in which the center is moved;
c
nearest
is the
center of either the nearest detector or the nearest self-point (see Figure 4.12b). In
contrast, cloning of a better-fi t detector is described by
where
dir
=
c
−
dir
dir
where
c
clone
is the center of a detector clone and
c
old
and
r
old
are the center and radius
of the original detector, respectively. Because the detectors have hyperspherical
shapes, overlap is necessary to cover the continuous nonself space (see Figure 4.12c).
However, detectors are evaluated by the eff ective coverage, which is computed as
their actual volume, but excluding overlap with other detectors (see Figure 4.13).
h e overlapping measure of a detector
d
is computed as the sum of its overlap
with the rest of detectors as
c
clone
c
old
r
old
≠
∑
Wd
()
wdd
dd
(, )
with
r
r
D
d
d
wd d
(, )
(
e
1
)
m
and
2
r
d
′
w
(
d, d
)
is the overlap measure between two detectors and
m
is the dimension of
the feature space. h is measure estimates the volume of the overlapped region.
h erefore, the following parameters are used during the detector generation
process:
=
r
s
threshold value of a self-point (a point at a distance greater than or equal
to
r
s
from a self-sample is considered to be as part of nonself )
α
=
parameter used to specify the off set when a detector is moved
ξ
=
maximum allowed overlap





Search WWH ::

Custom Search