Graphics Programs Reference
In-Depth Information
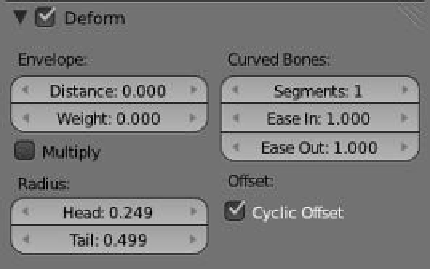
Figure 15.36
15.10 Inverse Kinematics
The inverse kinematics (IK) solver constraint is a won-
derful tool for animators. IK is the opposite of FK, or
forward kinematics, and both IK and FK are ways of
controlling the posing and animation of a chain of
bones. With FK, you have to rotate the chain of bones
one by one to pose it for animation; this is a tedious
process but gives you full control. With IK, dragging
the end of the chain will result in the chain following
the selected bone.
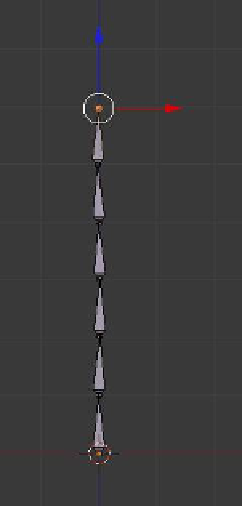
An example would be to create a chain of bones as
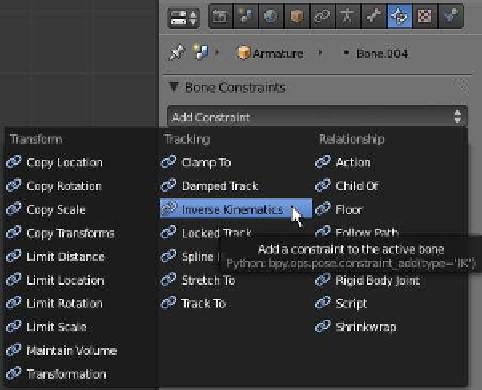
shown in Figure 15.37. With the chain (armature) se-
lected, go into pose mode, select the last bone in the
chain, and in the properties window - “Bone Constraints” button, click on
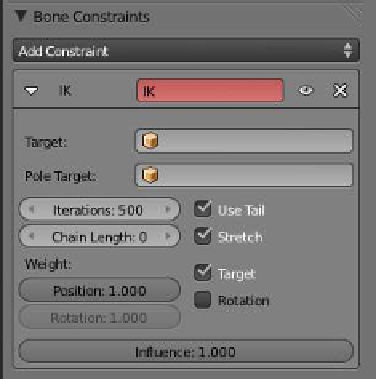
“Add Constraint” and select “Inverse Kinematics” (Figure 15.38). In the 3D
window in pose mode, with the end bone still selected, press the G key and
move the bone (Figure 15.39). Even in this single constraint, there are plenty
of settings to play with.
Figure 15.37
Figure 15.38