Hardware Reference
In-Depth Information
void main (void)
{
1.
Controller
CPU
ADD
Instruction
Memory
SUB
MAC
// Library I/F
MX ADD ( );
MX SUB ( );
:
2.
}
SIMD Data-path
3.
B[0]
+A[0]
B[1]
+A[1]
B[2]
+A[2]
B[3]
+A[3]
PE
PE
PE
PE
A[0]
A[1]
A[2]
A[3]
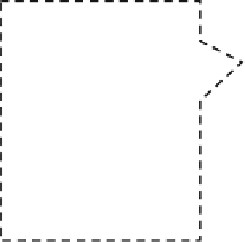
1. Calling the MX function.
2. Issuing the SIMD instruction.
3. SIMD parallel processing.
Fig. 6.10
MX microcode library
User Application
API
Application
Specific
Library
Application
Specific
functions
(Filters, FFT,
)
Image/Signal Processing Library
Microcode
Basic Library
Arithmetic/
Logical
functions
(ADD, AND,
)
Hardware
CPU
MX core
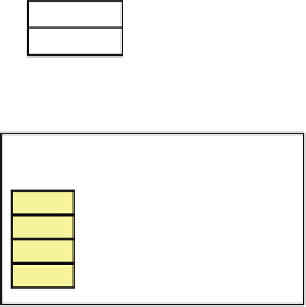
Fig. 6.11
Software interface of MX core
normally employs a CPU as a general-purpose controller. The CPU calls MX
microcode functions in the main program written in C language. The MX controller
decodes microcode functions called by the CPU and generates control signals for
the SIMD data path. In the data path, all PEs operate simultaneously by these control
signals. Overall, such simple programming realizes massively parallel operations
on the MX core [
5,
6
] .
The software interface of the MX core is shown in Fig.
6.11
. The CPU and MX
core are employed in the hardware layer. The primitive microcode library is imple-
mented to support the simple arithmetic and logical operations. In addition, an
application-specific library layer, for example, an image and signal processing
library, is prepared in the higher layer. This library layer offers the optimum codes
for the MX core and CPU, and it conceals the unique hardware structure of the MX
core. Therefore, users only need to call the simple APIs of the specific library and
do not have to worry about the super parallel structure of the MX core.





























Search WWH ::

Custom Search