Graphics Reference
In-Depth Information
it constrains fully (0 min, 0 max), as shown in
Figure 8-74
.
This ensures that the object can move and rotate
freely in any direction except twisting.
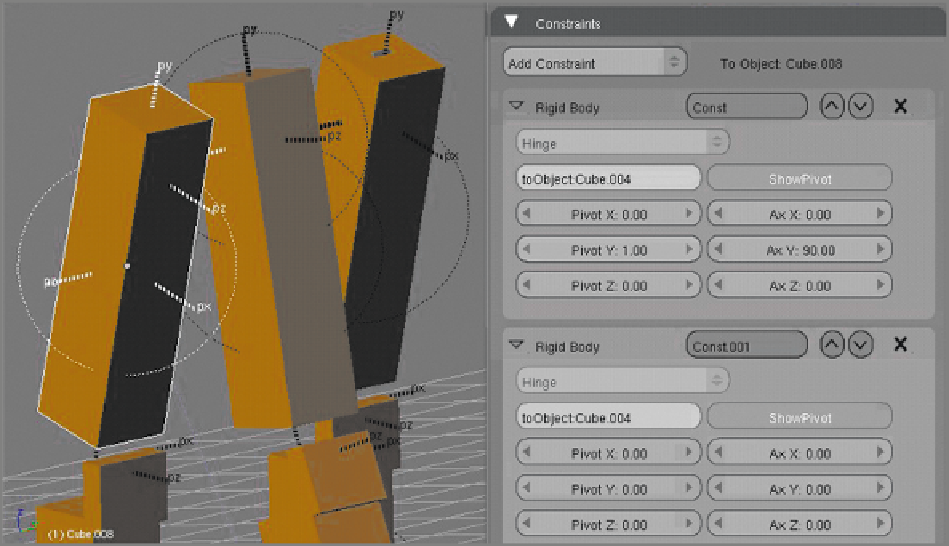
Figure 8-73
Hinge constraints
The robot is designed to walk as in
Figure 8-75
. The walker is extremely sensitive to changes in any aspect
of the environment; mass of objects, speed, relative distances, and the slope of the walking surface all need to
be set just right, and slight changes in the Bullet library and the Blender game engine may render it unstable. It
may also be unstable on operating systems other than Windows. On my Mac Pro using Blender 2.44, the robot
stumbles at about the 4 marker.