Information Technology Reference
In-Depth Information
1
Ideal
N = 100
N = 60
N = 20
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
h
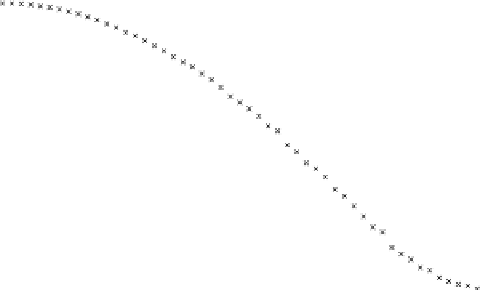
Fig. 17.2. Order parameter v
a
vs. for dierent N and for the ideal case (Eq. (17.11), continuous
line). The density has been xed at = 4 for all the cases. Other parameters are r = 1, t = 1
and L =
p
N=. Initial conditions are random.
condition for the coordination of all agents is that the graphs are nally linked
together, i.e. if the union of the graphs starting from any time is connected. The
case of 6= 0 has not been treated in many works. In this section we study some
aspects of the Vicsek's model in presence of noise.
At rst, let us consider the case in which each agent knows the heading of all
the other agents, i.e. when all the agents are packed forming only one group. In
this caseh
i
i
r
= for every agent and, since v
i
= e
j
i
, v
a
is given by the following
expression:
N
N
X
X
1
N
1
N
e
j
i
e
j
e
j
v
a
=
=
(17.10)
i=1
i=1
and thus
N
X
1
N
e
j
v
a
=
:
(17.11)
i=1
The behavior of v
a
versus the noise parameter is shown in Fig. 17.2. It
illustrates simulation results along with the curve v
a
vs. corresponding to equation
(17.11). This last curve is a sort of best case in which each agent lies in the
neighborhood of each other (i.e. an all-to-all communication scheme). In this
case the agents move in a packed group, maximizing v
a
. The average velocity v
a
depends only on the noise, which degrades the overall performance of the system.
This case can be achieved with an high agent density in a small environment.
In general, not all the agents will belong to each other's neighborhood, and the
eects of the random perturbation on
i
will change from agent to agent. There-
fore,h
i
i
r
will depend on i, and v
a
will be smaller than the value predicted by