Information Technology Reference
In-Depth Information
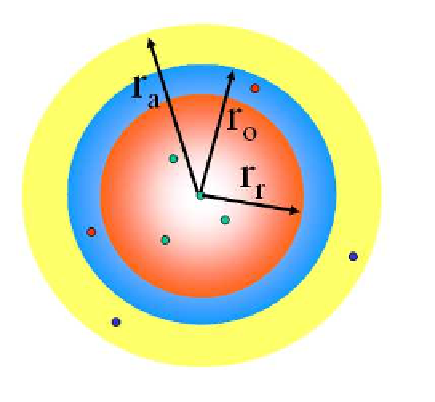
Fig. 17.1.
Repulsion, orientation, and attraction radius in the Couzin's model.
Each agent move with the same absolute velocity , position vector c
i
, velocity vec-
tor v
i
. The discrete-time model is run with a sampling time t. Figure 17.1 shows
the three radii (i.e., repulsion, orientation, attraction) which can be individuated
around a specic individual. As can be noted, the relation r
r
< r
o
< r
a
holds.
When an agent senses neighbors within his repulsion radius, it undertakes an
avoidance task by turning away from its neighbors. Avoidance is the task with the
highest priority and, if agents are detected in the repulsion radius, this is the only
task which is performed. The avoidance task, performed by the ith agent, can be
modelled with the equation
X
c
j
(t)c
i
(t)
j(c
j
(t)c
i
(t))j
d
ri
(t + t) =
(17.3)
j6=i
where d
ri
represents the desired direction of travel under an avoidance condition.
If no agents are detected within the repulsion radius, orientation and attraction
tasks are performed. Agents performing the orientation task tend to align their
direction to the average direction of motion of neighbors within the orientation
radius, as
X
v
j
(t)
jv
j
(t)j
:
d
oi
(t + t) =
(17.4)
j6=i
When an agent performs the attraction task, it tends to approach the neighbors
sensed within the attraction radius (and out of the orientation radius), as
X
c
j
(t)c
i
(t)
j(c
j
(t)c
i
(t))j
:
d
ai
(t + t) =
(17.5)
j6=i
When neighbors are sensed in only one zone (i.e., either orientation or attrac-
tion), then a single task is performed. If neighbors are present in both zones, then