Graphics Reference
In-Depth Information
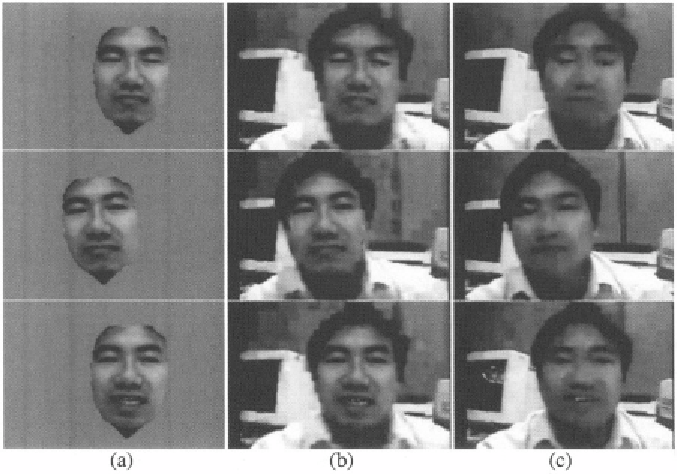
Figure 4.2.
(a): The synthesized face motion. (b): The reconstructed video frame with syn-
thesized face motion. (c): The reconstructed video frame using H.26L codec.
2001]. Compared to other 3D non-rigid facial motion tracking approaches using
single camera, which are cited in Section 1, the features of our tracking system
can be summarized as: (1) the deformation space is learned automatically from
data such that it avoids manual crafting but still captures the characteristics
of real facial motion; (2) it is real-time so that it can be used in real-time
human computer interface and coding applications; (3) To reduce “drifting”
caused by error accumulation in long-term tracking, it uses templates in both
the initial frame and previous frame when estimating the template-matching-
based optical flow (see [Tao and Huang, 1999]); and (4) it is able to recover
from temporary loss of tracking by incorporating a template-matching-based
face detection module.
4. Summary
In this chapter, a robust real-time 3D geometric face tracking system is pre-
sented. The proposed motion-capture-based geometric motion model is adopted
in the tracking system to replace the original handcrafted facial motion model.
Therefore, extensive manual editing of the motion model can be avoided. Us-
ing the estimated geometric motion parameters, we conduct experiments on
Search WWH ::

Custom Search