Geography Reference
In-Depth Information
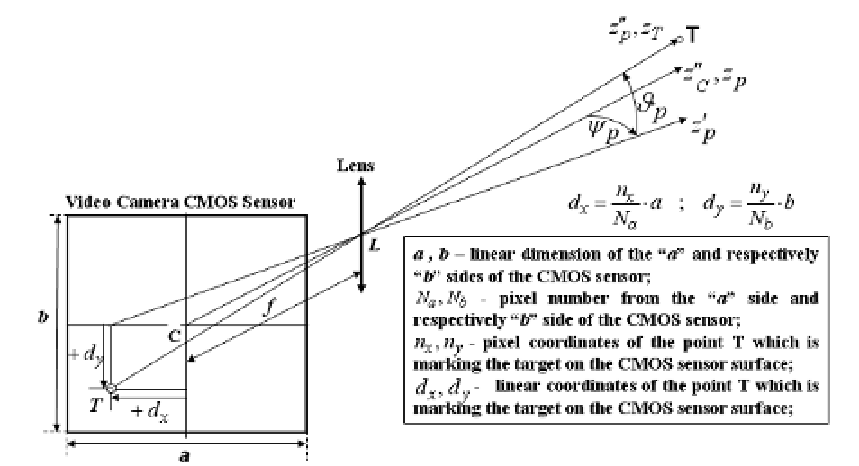
Afterwards, in a post processing regime, the pixel coordinates of the point, representing the
target in each of the two images are determined, and, thus, it is possible to establish in each
case the target angular position, relative to the video camera axis (Fig. 12).
Figure 12.
The definition of the deviation angles
ψ
p
and
θ
p
of the target direction relative to the central
axis of the viewing field of the video camera
-
To assure the positioning of the sighted objectives in the frame of the global terrestrial
system of coordinates and their registering in files of GIS (Geographic Information
System) type, at the operator returning at the computing centre, from the obtained
images, series of two images are selected. In these series of two images the same sighted
objective is evidenced in a corresponding mode, which will allow the selection of this
objective in an electronic modality and the determination of the pixel coordinates which
achieves the objective displaying on the monitor screen. These coordinates together
with other data which accompany the two selected images, permit to compute the
geographic and elevation coordinates of the sighted objective with the use of using
triangulation proceedings as well as methods to report to the spherical system of the
terrestrial coordinates.
So, as it is presented in figure 12, in the post processing regime, the pixel coordinates of the
point representing the target in each of the two images are determined, and, on this basis, it
is possible to establish in each case the target angular position relative to the video camera
axis.
-
To achieve, in real time, the precise positioning of the lab vehicle, with errors that can
be included between few millimetres and some centimetres, it resorts to the use of a
GPS positioning system with multiple frequencies and with differential RTK (Real Time
Kinematic) regime functioning capability. This means that it has the possibility to be