Graphics Reference
In-Depth Information
The faces of a cubemap are each specified in the same manner as one
would specify a 2D texture. Each of the faces must be square (e.g., the
width and height must be equal), and each must have the same width
and height. The 3D vector that is used for the texture coordinate is not
normally stored directly on a per-vertex basis on the mesh as it is for
2D texturing. Instead, cubemaps are usually fetched from by using the
normal vector as a basis for computing the cubemap texture coordinate.
Typically, the normal vector is used along with a vector from the eye to
compute a reflection vector that is then used to look up into a cubemap.
This computation is described in the environment mapping example in
Chapter 14, “Advanced Programming with OpenGL ES 3.0.”
Another type of texture in OpenGL ES 3.0 is the 3D texture (or volume
texture). 3D textures can be thought of as an array of multiple slices of
2D textures. A 3D texture is accessed with a three-tuple (
s
,
t
,
r
) coordinate,
much like a cubemap. For 3D textures, the
r
-coordinate selects which slice
of the 3D texture to sample from and the (
s
,
t
) coordinate is used to fetch
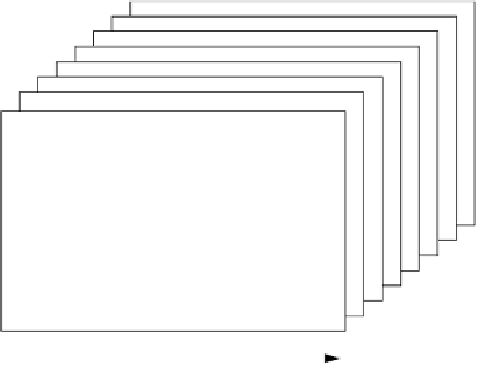
into the 2D map at each slice. Figure 9-3 shows a 3D texture where each
slice is made up of an individual 2D texture. Each mipmap level in a 3D
texture contains half the number of slices in the texture above it (more on
this later).
3D Texture
+t
+r
+s
Figure 9-3
3D Texture