Information Technology Reference
In-Depth Information
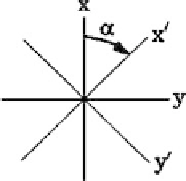
Fig. 1.3
Rotation of a
reference frame
Thus,
)]
−
1
[
R
(
E
(
)
=
[
R
(
)]
E
=
[
R
(
)][
Z
]
H
=
[
R
(
)][
Z
][
R
(
)]
H
=
[
Z
(
)]
H
(
)
,
where
) ]
−
1
[
Z
(
)]
=
[
R
(
)][
Z
][
R
(
.
(1
.
25)
In full form, we have
=
Z
xx
cos
2
+
Z
yy
sin
2
Z
xx
(
)
+
(
Z
xy
+
Z
yx
)sin
cos
Z
xy
cos
2
Z
yx
sin
2
=
−
−
(
Z
xx
−
Z
xy
(
)
Z
yy
)sin
cos
(1
.
26)
=
Z
yx
cos
2
−
Z
xy
sin
2
Z
yx
(
)
−
(
Z
xx
−
Z
yy
)sin
cos
Z
yy
cos
2
Z
xx
sin
2
Z
yy
(
)
=
+
−
(
Z
xy
+
Z
yx
)sin
cos
or
Z
xx
(
)
=
Z
2
+
Z
3
sin 2
+
Z
4
cos 2
Z
xy
(
)
=
Z
1
+
Z
3
cos 2
−
Z
4
sin 2
(1
.
27)
Z
yx
(
)
=−
Z
1
+
Z
3
cos 2
−
Z
4
sin 2
Z
yy
(
)
=
Z
2
−
Z
3
sin 2
−
Z
4
cos 2
,
where
Z
xy
−
Z
yx
2
Z
xx
+
Z
yy
2
Z
1
=
Z
2
=
Z
xy
+
Z
yx
2
Z
xx
−
Z
yy
2
Z
3
=
Z
4
=
.
One can readily see that
=
+
=
+
/
Z
xx
(
)
Z
xx
(
)
Z
yy
(
2)
Z
xy
(
)
=
Z
xy
(
+
)
=−
Z
yx
(
+
/
2)
(1
.
28)
Z
yx
(
)
=
Z
yx
(
+
)
=−
Z
xy
(
+
/
2)
Z
yy
(
)
=
Z
yy
(
+
)
=
Z
xx
(
+
/
2)
.