Information Technology Reference
In-Depth Information
noise n
from input signal by
signal ( )
xn
=
sin(100
π
ft
)
, we can filter noise signal
( )
adaptive notch filter.
In Fig.2, we make output signal
approximate
in least mean square
error
y
(
n
)
d
(
n
)
by adjusting adaptively filter weights
w
and
w
.
At this time, error signal
is
e
(
n
)
output signal of adaptive notch filter.
(1) The simulation of adaptive notch filter in Matlab
%main
…
s=10*sin(4*pi*t)+3*sin(100*pi*t);
…
x1= sin(100*pi*t);
x2= sin(100*pi*t+pi/2);
…
for k=1:50
y(k)= w1(k)*x1(k)+ w2(k)*x2(k);
e(k)=s(k)-y(k);
w1(k+1)=w1(k)+2*0.1*e(k)*x1(k);
w2(k+1)=w2(k)+2*0.1*e(k)*x2(k);
end
…
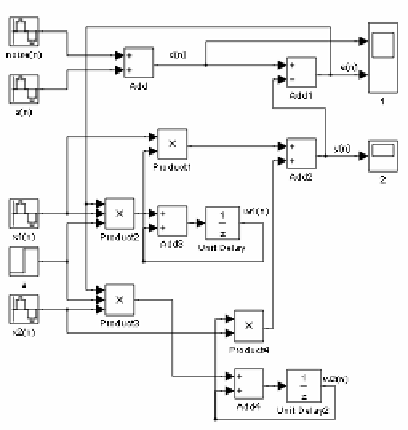
(2) The simulation of adaptive notch filter in Simulink
We can establish the corresponding Simulink simulation model according to the
principle diagram of adaptive notch filter of Fig.2, as shown in Fig. 3.
Fig. 3.
The simulation model of adaptive notch filter based on LMS algorithm




Search WWH ::

Custom Search