Information Technology Reference
In-Depth Information
3 PID Control Method Based on BP Neural Network
The control functions of proportion, integral and differential should be properly
adjusted to form a control relationship of mutual restriction and interdependence to
achieve a good control effect for PID control method. This relationship is not a
necessarily simple "linear combination" and the best relationship can be found from
the boundless linear combination. Neural network can fully approximate any
complicated nonlinear relationship with an ability of expressing arbitrary nonlinearity
and of self adapting and self learning for complex uncertain systems and can fulfill
the optimal PID control by learning the performance of the system. The error back
propagation network (BPis widely used in the neural network model and it is a kind
of network which has hidden multilayer.
3.1 Control Principle
Self-learning PID controller can be created by adopting BP neural network, where the
outputs of the neural network are proportional, integral and derivative gains.
The
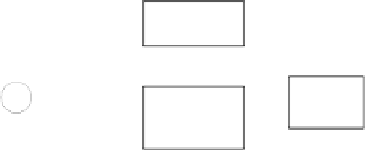
control structure of PID controller based on BP neural network is shown in Fig.2,
which is composed of two parts as follow:
(i) General PID controller
The controlled object can be directly controlled by general PID controller in a
closed-loop manner where the three parameters KP, KI and KD are adjusted on line.
The numerical PID control algorithm employed in the study is given by
.
u
(
k
)
=
u
(
k
−
1
+
K
(
e
(
k
)
−
e
(
k
−
1
))
+
K
e
(
k
)
+
K
(
e
(
k
)
−
2
e
(
k
−
1
+
e
(
k
−
2
))
(5)
P
I
D
K
K
and
K
are the proportional, integral and derivative gains,
where
P
respectively.
(ii) Neural network
Neural network adjusts the parameters of PID controller in order to make some
performance index optimize with respect to the operation condition of the controlled
object. Through the self-learning and the adjusting of the weighting coefficients of neural
network to get a certain optimal control law for PID controller the three adjustable
parameters of
K
,
K
and
K
, which are the outputs of the neural networkare
obtained.
%3QHXUDO
QHWZRUN
. . .
U
N
H
\
N
&RQWURO
REMHFW
3,'
FRQWUROOHU
GH
HF
GW
Fig. 2.
Control structure of PID controller based on BP neural network























Search WWH ::

Custom Search