Biomedical Engineering Reference
In-Depth Information
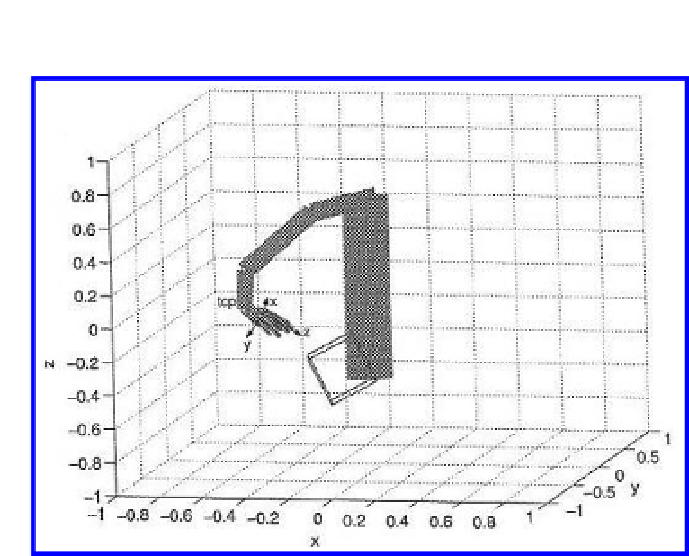
Figure 6.16.
Simulation of an unknown grasping of a familiar object in a known location
is demonstrated. Reprinted from Int J Human-Computer Studies, Volume 65, Issue 5, L
Robertsson
et al.
, Perception modeling for human-like artificial sensor systems. Copyright
(2007) with permission from Elsevier.
e.g. Kalyanaraman (2008), can be an interesting aspect of prosthesis with extended
capabilities. The artificial hand will probably increase the mimicking ability and
involve the skin's performance to sense the texture, temperature, etc. A major con-
cern is also if a person using a prosthesis is able to perform better and due to more
advanced technology, will be superior to the ordinary human hand? This will cer-
tainly provide other perspectives on the future abilities. Anyway, prosthesis with
advanced performance will consequently, contribute to improved movements. An
active and useful prosthesis in the future will most likely be able to improve the
life of many disabled individuals.
6.4.4 Perspectives on Perceptual Sensing Systems
In many human-related application concepts using sophisticated measurement
technology, the methods that require a strategy for collecting information about
an activity is an extensive and demanding task. The kind of information required
in a measurement process may rapidly change and requires a dynamic operational
principle. In fact, when there is a need to get a complex situation analysis instead of
the normal and often simplified measuring process of single parameters' responses
with a selective-analytical approach, we may find it useful to measure general and
amalgamated attributes, for example:
— quality,
— availability,






Search WWH ::

Custom Search