Biomedical Engineering Reference
In-Depth Information
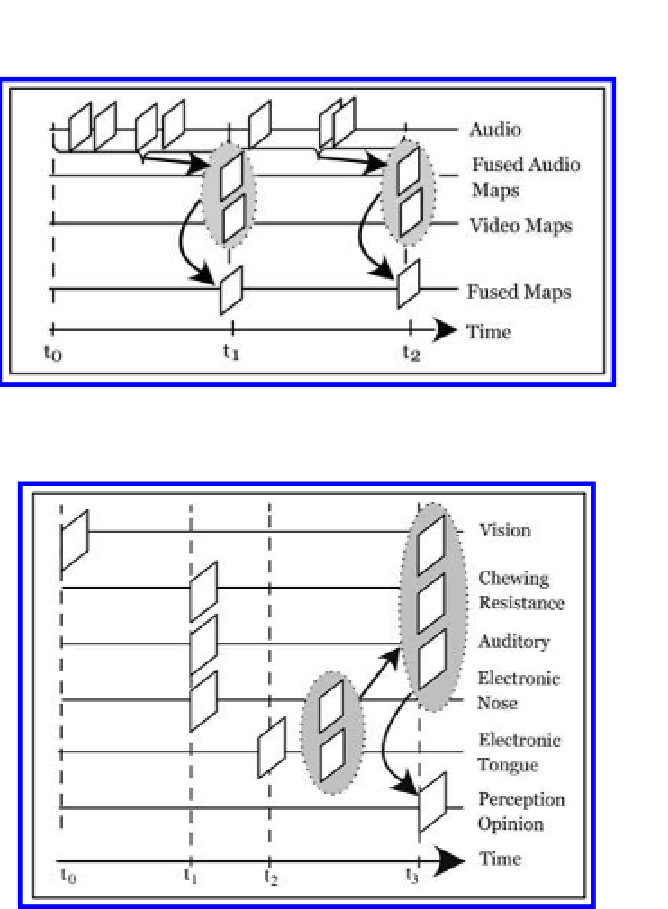
Figure 5.13.
The direct perception model, where data from different sensor systems are
transferred in a specific time scale.
Figure 5.14.
The sequential perception, where sequential time handling of different sensor
systems is considered.
sub-processes into an overall information. This fusing process was introduced by
Wide (1999), fusion of a complete electronic head experiment containing five basic
sensing abilities, (including also an additional auditory related sensor system).
The fusing procedures above relates to a direct and sequential time representa-
tion respectively, and the models contain different structural concepts to deal with
the collected data that are related to the time factor in a sensor fusion system.
An additional variant may also be included in the strategic view of a generic
sensor-based perception model, presented in Fig. 5.15. This specific approach is
considered when past information is revealed from storage, i.e., a memory. The
procedure has then the advantage that it will consider and fuse earlier experiences
from a memory in conjunction with the received sensor(s) data at specific time
tags. The earlier gained information is of a historical value and is able to provide






Search WWH ::

Custom Search