Biomedical Engineering Reference
In-Depth Information
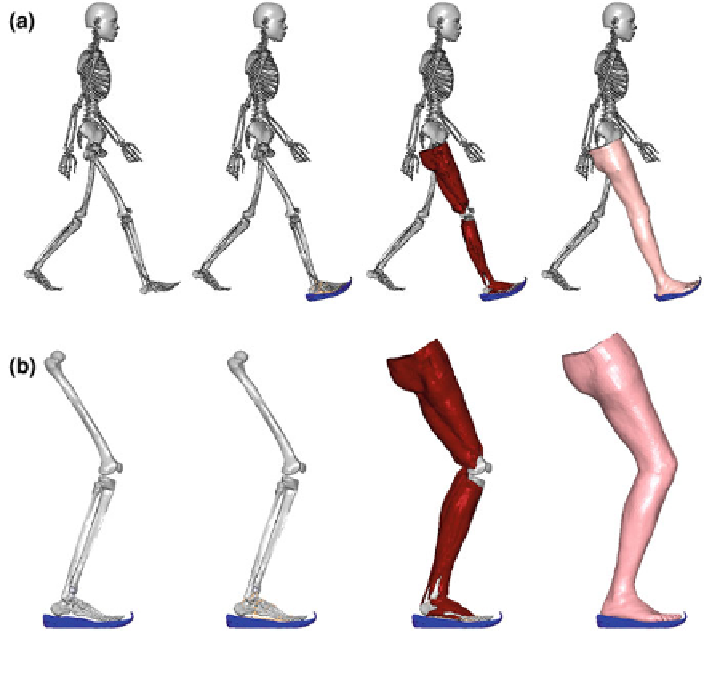
Fig. 5.71 FE-models of the complete skeleton with right leg anatomy in the bi-pedal stance
phase in a walking, and b mono-pedal stance phase in running
moved over the leg, generating the force minimum (F2). Subsequently, the BCM is
lowered during rolling of the forefoot (phase 3) and is 'captured' and decelerated, in the
terminal stance phase (TSt), generating the second maximum (F3). The force level then
decreases to zero, due to loss of foot contact with the ground.
During running, the characteristics of the ground reaction forces can be thought of
as a compressed version of the force characteristics during walking. However, only
one force maximum is apparent during running, cf. Fig.
5.70
b, which can increase to
twice the body weight depending on the running speed (cf. Fig.
5.70
b: body mass of
the volunteer: 75 kg and maximum force of 1,800 N). In general, with increasing
running speed, the stance phase time decreases and the swing phase time increases.
Depending on the running speed, the ratio of stance to swing phase time ranges from
30 to 70 %. Figure
5.70
b depicts measured ground reaction force characteristics
during walking and running with sports shoes, as well as barefoot. Here, a complete
force vector has been captured, i.e. one normal component in the vertical direction
and two shear force components in the plane of the ground force plates.
Due to increased ground reaction forces during running, significantly higher
loading on the leg ensues, compared to walking. Furthermore, differences in the joint