Biomedical Engineering Reference
In-Depth Information
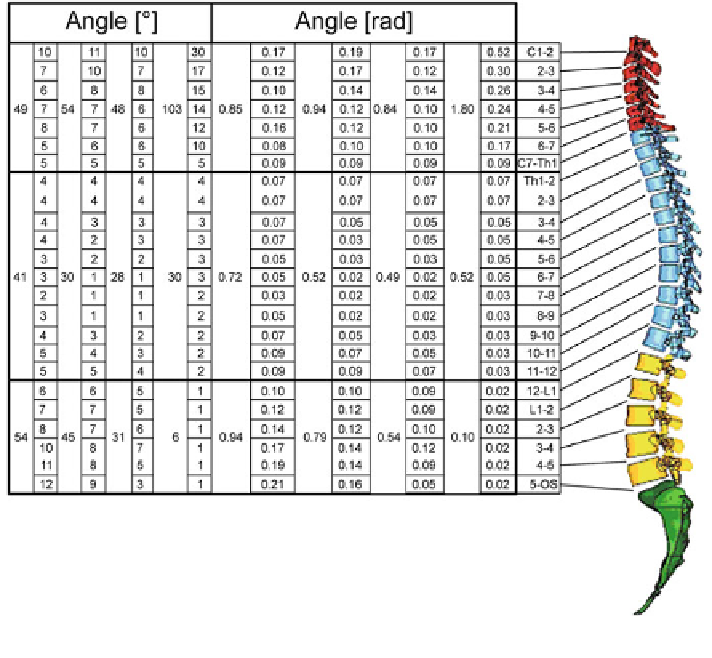
Fig. 5.42
Mean values of relative joint displacement (Lazarus 2009)
and sufficient for the human models introduced here, is based on an engineering-
scientific approach, described by (Lazarus 2009).
The modelling of the kinematic status of the joints of all vertebrae may be
accomplished in the form of C
ARDAN
-joint definitions (e.g. via CONN3D2 elements in
A
BAQUS
, see Fig.
5.41
a) with arbitrary rotation in all three spatial axes. Modelling of
the dynamic status is done by assigning connector elastic behaviour properties via a
moment-angle-characteristic to each joint element for each spatial axis. Limitations in
motion are prescribed by maximal moment values at the particular ''stop-angles''.
In Fig.
5.41
b moment-angle-characteristics of the fourth and fifth lumbar
vertebrae are shown. The characteristics of all other vertebral joints are qualita-
tively similar, and differ only in angle rotational displacement. According to
Fig.
5.41
b, the range between 0 and 10
2
Nmm represents the ''starting range'',
between 10
2
and 10
3
Nmm the ''working range'' and (between points A and B) to
10
6
the ''saturation range'' of the joint with a motion-stop at point B. In the
depicted example, a partial linear progression is assumed.