Biomedical Engineering Reference
In-Depth Information
0.09
SD
0.08
SD
0.07
0.06
0.05
CE
0.04
RCE
CE
RCE
0.03
0.02
0.01
0
−
15
−
10
−
5
0
5
10
15
X Rotation (degrees)
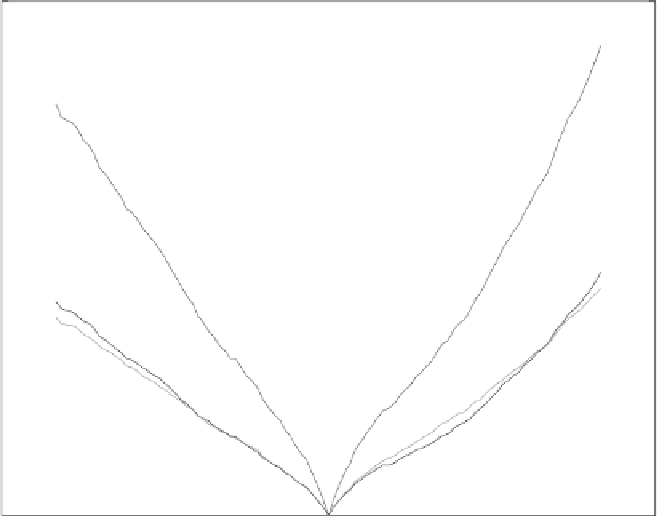
Figure 10.11: The cross-entropy (CE), reversed cross-entropy (RCE), and sym-
metric divergence (SD) profiles (with a likely priori) of an MR/Em image pair in
the vicinity of a manual registration when the x-rotation changes independently.
Figures 10.11-10.13 show the representative profiles of these similarity mea-
sures as a function of rotation angles about the
x
-,
y
-, and
z
-axis, respectively.
Figures 10.14-10.16 show the representative profiles of these similarity mea-
sures as a function of translation along the
x
-,
y
-, and
z
-axis, respectively. As
revealed by all these figures, there are valleys in the profiles around the manual
registration parameters, which is one of the necessary conditions for a good
registration measure. As expected, the minimum values in all cases are zero
since the priori pdf and the estimated pdf at this registration are identical.
10.5.2.3
Numerical Stability for Minimization
In the cross-entropy minimization calculation, if the priori pdf is zero, the cross-
entropy is not stable. To address this case, one can either ignore the zero priori
pdf terms or substitute the zero pdfs with small positive numbers and use the