Biomedical Engineering Reference
In-Depth Information
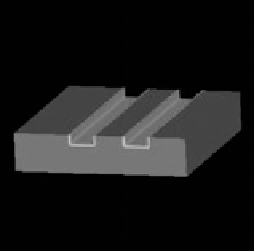
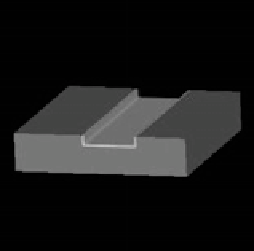
Source volume
Target volume
Figure 8.10:
Synthetic data to validate the link between robust estimator on
the regularization term and local changes of topology.
if its resources are limited. In our case, we find that
f
=
1 (the smallest cubes
are of size 2
×
2
×
2 and the allowed deformation is rigid on the smallest cube)
is generally a good compromise.
Importance of Robust Estimator.
We have introduced robust estimators
in the registration process, in order to let local discontinuities of the deformation
field occur. We now want to verify on simulated data the direct link between
the introduction of a robust function and the possibility to locally change the
topology of the structures. Therefore, we construct two volumes (see Fig. 8.10)
to be registered, with a local modification of the topology. The volumes are
composed of two homogenous classes, each one being defined by a unique gray
level. With these two volumes, we obviously face the aperture problem, which
is classical in the optical flow literature.
We first register the two volumes without any robust estimator. Results are
presented in Fig. 8.11. The reconstructed volumes are computed with the target
volume and the estimated deformation field with trilinear interpolation. One
must therefore compare the reconstructed volume and the source volume to
assess the quality of the registration. The different volumes shown in Fig. 8.11
correspond to different values of the parameter
α
. This parameter balances
the importance of the similarity term and the regularization term. When this
parameter is high, the solution is smooth but the topology is not modified. When
α
decreases, the solution is not smooth, the aperture problem is obvious, whereas
the topology is not correctly modified.