Biomedical Engineering Reference
In-Depth Information
where
δ
s
and
β
sr
are auxiliary variables (acting as “weights”) to be estimated.
This cost function has the advantage to be quadratic with respect to
w
. It also
shows clearly that, when a discontinuity gets larger, the contribution of the
pair of neighbors is limited by the reduction of the associated weight
β
sr
. The
minimizers of
U
with respect to the auxiliary variables are obtained in closed
form [14, 24]. The overall minimization of such function consists in an alternated
weights computation and quadratic minimizations (with respect to
w
).
8.3.2.5
Multiresolution Incremental Computation
of the Optical Flow
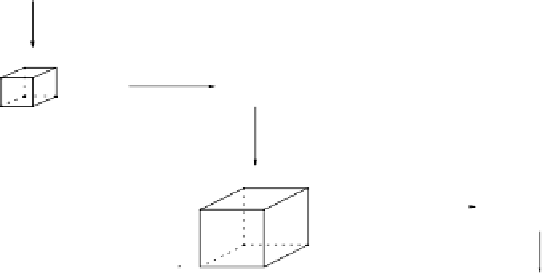
In cases of large displacements, we use a classical incremental multiresolution
procedure [11, 48] (see Fig. 8.1). We construct a pyramid of volumes
{
f
k
}
with
successive Gaussian smoothing and subsampling in each direction [20]. For each
direction
i
=
x
,
y
,
z
,
d
i
is the spatial resolution of a voxel (the spatial resolution
of MR acquisition is around 1 mm, depending on the system). We perform a
Gaussian filtering using the recursive implementation proposed in [45] with a
standard deviation of 2
d
i
in direction
i
, in order to satisfy Nyquist's criterion.
This implementation allows to perform infinite impulse response filtering at a
constant computation cost.
At the coarsest level, displacements are reduced, and cost function (8.3) can
be used because the linearization hypothesis becomes valid. For the next resolu-
tion levels, only an increment
d
w
k
is estimated to refine the estimate ˆ
w
k
obtained
Resolution level
k
+ 1
w
k
minimization
Resolution
level
k
d
w
k
= 0
ˆ
d
w
k
+
w
k
ˆ
Projection
w
k
−
1
minimization
ˆ
ˆ
d
w
k
−
1
=0
d
w
k
−
1
+
w
k
−
1
Resolution
level
k
−
1
Resolution level
k
−
2
Figure 8.1:
Incremental estimation of the optical flow.