Biomedical Engineering Reference
In-Depth Information
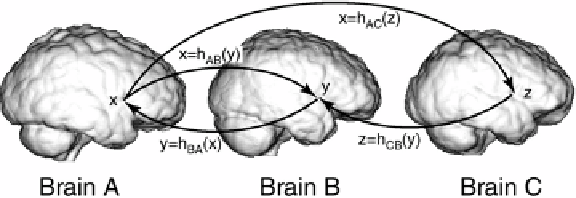
Figure 6.2:
Notation used to describe transformations from one coordinate
system to another.
6.3
Transformation Properties
The following definitions will be used throughout this section. Let
T
i
for
i
∈
Q
=
{
A
,
B
,
C
,...
}
denote a set of homogeneous, topologically-equivalent anatomical
images defined on the coordinate system or domain
=
[0
,
1]
3
. For example,
T
A
,
T
B
, etc., may correspond to a set of 3D MRI brain images collected from age
and sex matched normals or abnormals or some other suitable classification
criteria. Let
h
AB
represent the transformation from the coordinate system of
image
T
A
to that of image
T
B
in terms of the coordinate system of image
T
B
as shown in Fig. 6.2. Let the linear transformation
x
=
h
AB
(
y
) deform image
T
A
(
x
) into a new image
T
(
y
)
=
T
A
(
h
AB
(
y
)) that resembles the shape of image
T
B
(
y
) by transforming the coordinate system of image
T
A
to that of image
T
B
.
Define
H
as the set of all transformations
h
AB
(
x
) for
A
,
B
∈
Q
and
x
∈
. Let
||
x
|| =
x
1
+
x
2
+
x
3
denote the standard 2-norm.
6.3.1
Invertibility Property
Many nonlinear image registration algorithms have difficulty producing inverse
consistent transforms because they use a finite set of basis functions (eigen-
functions of an operator, polynomials, etc.) that are not always closed under
composition. This observation is a major reason why it is important to measure
the inverse consistency error produced by different registration algorithms. This
fact motivates the minimization of the inverse consistency constraint error that
is used by the consistent linear elastic registration error since it is not possible
to reduce the inverse consistency error to zero when using the
a
finite set of
complex exponential basis functions.