Biomedical Engineering Reference
In-Depth Information
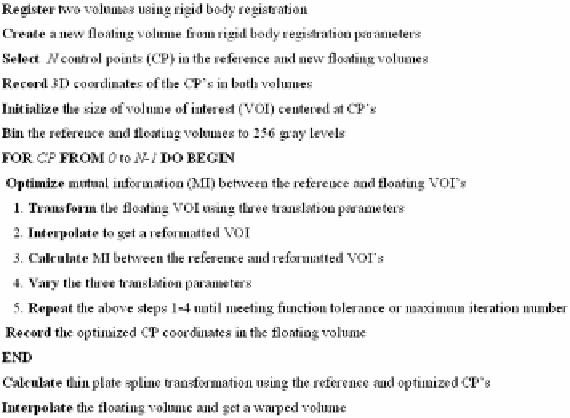
Figure 3.8:
Flow chart of the warping registration algorithm. Following rigid
body registration,
N
control points are selected in both the reference and float-
ing volumes. A small cubic volume of interest (VOI) is centered on each control
point. Optimization is performed by varying the
x
,
y
, and
z
locations of the
floating VOI until the mutual information between corresponding voxels is max-
imized. Each control point is optimized independently, and then the optimized
control points are used to establish a three-dimensional thin plate spline trans-
formation for the entire volume.
aligned two volumes are displayed in two rows slice-by-slice. Images can be
transverse, coronal, or sagittal slices. It is quite straightforward to find cor-
responding features at the pelvis, prostate, bladder, and rectum. We normally
select control points (CPs) using recognizable organ features such as corners
and intersections of edges because of their unique positions. Corresponding CPs
in the two volumes are placed using a cursor, and sometimes they are in differ-
ent image slices. The 3D coordinates are automatically stored in a file. Because
of the optimization that occurs later, the correspondence can be up to 15 mm
or
≈
10 voxels in error. Experiences with CP selection are described in Section
3.3.4.4. Typically, we used 180 CPs for a volume with 256
×
256
×
140 isotropic
voxels.
The next step of the non-rigid algorithm (Fig. 3.8) is the CP optimization.
We define a small cubic volume of interest (VOI) centered at each CP. The VOI