Information Technology Reference
In-Depth Information
it had to be removed through a segmentation and filtering step. Similar filtering was
also required in Laube et al. (
P12
.
2011a
) working with the same cattle tracking data.
Many segmentation approaches are based on the idea that in an immobile phase the
area covered by the object during that interval must be smaller than when the object
is moving. Laube et al. (
P12
.
2011a
) use a minimal enclosing circle, whereas Laube
and Purves (
P13
.
2011
) based their stop detection on an average Euclidean distance
to other fixes inside a temporal window
i
to be less than some threshold
d
(see
Fig.
3.4
).
Furthermore, segmentation can be based on the shape of the trajectory. Trajec-
tories can be split into segments of similar straightness or sinuosity, or at sharp
turns. Alternatively trajectory segmenting can be performed based on any descrip-
tive parameter assigned to individual fixes. A stop could then simply be identified
by, for instance, low speed values (
P14
. Dodge et al.
2012
). Either parameters such
as speed, acceleration, heading, or sinuosity emerge from the primary sensor sys-
tem or they are derived through instantaneous or interval trajectory operators (see
P3
. Laube et al.
2007
, Sect. 2.3.1). Segments or subtrajectories are then delineated
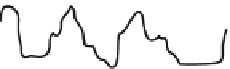
based on sequences of uniform parameters. Dodge et al. (
P14
.
2012
) go one step fur-
ther and categorize the derived movement parameters (MP) into a set of predefined
classes, creating a string-like representation of the characteristic of the trajectory
(see Fig.
3.5
). These MP class sequences are then used for assessing the similarity
between “strings”, or trajectories respectively (see Sect.
3.2.2
).
Whereas most examples in this chapter adhere to a preprocessing notion of seg-
mentation, it can also be the primary movement mining task of a study. Applications
(a)
(b)
z- score of
MP
T1: 'addMMAAAAccDDDDaaaCCCddOOOM'
µ
0
{
0
t
-mean
T2: 'aacccDDBMMbbddMMAAAcccDaac'
-
-µ/
µ
0
MP class sequence: 'aAbBMcCdDO'
Fig. 3.5
Trajectory segmentation based on a translation of trajectories into string-like sequences of
movement parameter (MP) classes. MP classes capture the deviation from the mean of a parameter
and the sinuosity of the MP profile, for example
a
(PHL)readsas“Positive High (deviation from
mean) and
L
ow (sinuosity). Adapted from Dodge et al. (
P14
.
2012
) (Republished from Dodge,
S., Laube, P., and Weibel, R., Movement Similarity Assessment Using Symbolic Representation
of Trajectories.
International Journal of Geographical Information Science
, 26(9), pp. 1563-1588,
2012, Taylor & Francis, DOI:10.1080/13658816.2011.630003)