Information Technology Reference
In-Depth Information
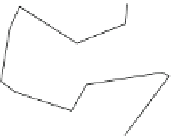
(a)
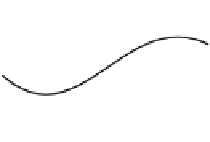
(b)
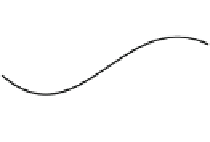
(c)
Fig. 2.2
Lagrangian versus Eulerian perspectives of movement.
a
The Lagrangian perspective
focuses on the changes of location of the moving object, for example a GPS-tracked animal. The
Eulerian perspective tracks moving objects as passing by fixed observations points, e.g., traffic
gantries in
b
or GSM cells in
c
readers, checkpoints or through gates or traffic gantries. In all these systems, the
location of the checkpoints are known and fixed, and movement is captured in the
form of the passing IDs and times of the MPOs. Recent developments in GSM and
mobile ICT promote the later perspective, as more and more systems track moving
objects in a checkpoint way.
Most research covered in this topic adheres to the Lagrangian perspective. These
studies have in common that a limited set of MPOs were tracked and their movement
patterns analyzed. Examples studied in this topic are racing pigeons for avian navi-
gation research (
P3
. Laube et al.
2007
), cows for precision farming (
P13
. Laube and
Purves
2011
), or fleet management issues with couriers (
P14
. Dodge et al.
2012
).
Equipping individuals with GPS receivers is ideal for studies where the test sub-
jects are known and accessible, but the movement range is potentially unknown in
advance.
By contrast, in some contexts the movement of individuals is constrained or bound
perspective may have advantages as the individuals must eventually pass a checkpoint
or gantry. For example, Both et al. (
P19
.
2013
) and Bleisch et al. (
P20
.
2014
) are based
on a scenario for river health monitoring where fish are tracked via implanted RF
transmitters when passing riverside RF readers in a simple topological river network.
A system adhering to the Eulerian perspective requires less sophisticated equipment
on the MPO side (RFID tags instead of GPS receivers and/or transmitters), and hence
results in lighter tracking devices. The fish tracking example showed that the con-
straints imposed by the Eulerian perspective could be exploited for information gain
checkpoints when moving, algorithms running at the checkpoints were enabled to
collect, enrich and exchange information about fish flows in the system as a whole.
One might argue that the Lagrangian perspective with a stream of GPS fixes offers
a more precise tracking approach than the Eulerian perspective with its checkpoints
with a potentially wide spacing. However, it should be noted that GPS data always is
error prone and uncertain and the checkpoints location can be surveyed to very high
precisions and at very fine spatial granularities. Hence, both perspectives can offer